FANUC ROBOGUIDE离线编程指南:从安装到仿真调试
需积分: 10 186 浏览量
更新于2024-07-17
收藏 3.39MB DOC 举报
"ROBOGUIDE-V8L是一款由FANUC公司提供的离线编程仿真软件,用于在没有实际机器人设备的情况下进行编程和操作练习。它包含多种子模块,如搬运、弧焊、喷涂和点焊,能模拟机器人及其周边设备的布局和运动轨迹,以验证方案可行性并计算动作节拍。软件的安装需先安装必备组件,然后按照安装向导逐步进行,选择所需工艺、应用程序、机器人软件版本等。"
1. ROBOGUIDE的简介
ROBOGUIDE是一个基于Windows界面的三维仿真环境,允许用户在虚拟环境中设计和编程机器人系统。它不仅支持机器人的示教编程,还能够模拟现实中的各种工况,如设备布局、任务执行,以及进行性能评估。用户可以借此学习和熟练掌握FANUC机器人的操作和编程技巧。
2. 软件安装步骤
安装ROBOGUIDE V8L前,需先安装所需组件。这些组件可在安装文件的支持文件夹中手动安装。接着,运行setup.exe,按照安装向导的提示进行:选择“Install”,同意许可协议,选择安装路径,定制安装选项(如工艺、应用程序),最后确认所有设置无误后点击“Finish”完成安装。
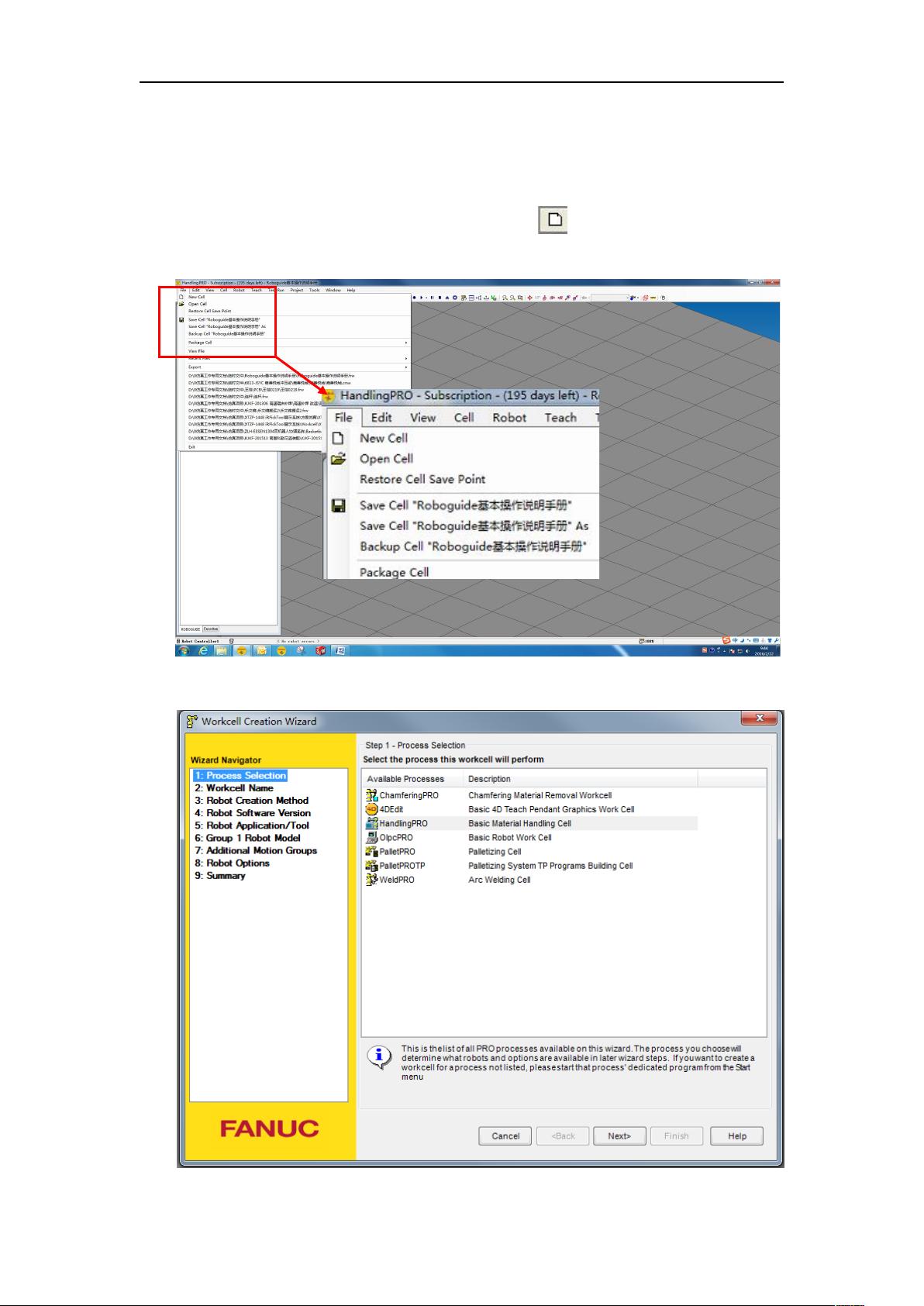
3. 新建Workcell
在ROBOGUIDE中新建Workcell是建立仿真环境的第一步。用户需要定义工作区域,添加机器人、周边设备,并设定它们的位置和姿态。这有助于创建一个逼真的工作场景,用于后续的编程和调试。
4. 添加设备
添加设备是构建仿真环境的关键部分,包括周边设备和机器人相关设备。周边设备如输送带、工件定位器等,而机器人相关设备则涉及机器人本体和工具。用户可以通过软件的界面,直观地拖放设备到Workcell中,调整参数以匹配实际应用。
5. 仿真调试及视频录制
- Roboguide中的示教盒(TP):用户可以在虚拟TP上编写和修改机器人程序,模拟实际示教过程。
- 示教机器人:用户可以控制机器人在三维空间中的运动,验证程序的正确性和效率。
- Simulation Program:这是ROBOGUIDE特有的模拟程序,可以测试机器人系统的完整流程,包括与周边设备的交互。
- 仿真视频录制:用户可以记录机器人的运动轨迹和整个工作流程,便于回放分析和展示。
通过以上内容,学习者可以全面了解ROBOGUIDE的基本操作,从而有效地在无实物条件下提升FANUC机器人的编程技能和操作理解。

图 2.2.11
点击 Finish 安装结束,弹出对话框:
图 2.2.12
重启电脑,即可使用 ROBOGUIDE7.7。
9
剩余46页未读,继续阅读
2023-04-26 上传
2020-07-04 上传
2024-03-25 上传
2019-08-06 上传
2019-07-05 上传

X_man13
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Haskell编写的C-Minus编译器针对TM架构实现
- 水电模拟工具HydroElectric开发使用Matlab
- Vue与antd结合的后台管理系统分模块打包技术解析
- 微信小游戏开发新框架:SFramework_LayaAir
- AFO算法与GA/PSO在多式联运路径优化中的应用研究
- MapleLeaflet:Ruby中构建Leaflet.js地图的简易工具
- FontForge安装包下载指南
- 个人博客系统开发:设计、安全与管理功能解析
- SmartWiki-AmazeUI风格:自定义Markdown Wiki系统
- USB虚拟串口驱动助力刻字机高效运行
- 加拿大早期种子投资通用条款清单详解
- SSM与Layui结合的汽车租赁系统
- 探索混沌与精英引导结合的鲸鱼优化算法
- Scala教程详解:代码实例与实践操作指南
- Rails 4.0+ 资产管道集成 Handlebars.js 实例解析
- Python实现Spark计算矩阵向量的余弦相似度
