智能车图像处理:高效去畸变技术详解
需积分: 5 23 浏览量
更新于2024-08-03
收藏 496KB DOCX 举报
"这篇文档详细介绍了智能车图像处理中的去畸变技术,通过使用特定的矩阵和指针映射,可以高效地实现图像矫正。文档提到了去畸变的重要性和适用场景,并提供了所需的工具和环境,包括棋盘标定图、赛道图以及去畸变上位机软件。同时,它还强调了内参测定的关键性,以及如何通过上位机求取相机内参。"
智能车图像处理中,去畸变是一项必不可少的技术,主要是为了修正由于镜头畸变导致的图像失真问题。畸变在广角镜头中尤为明显,表现为直线在图像边缘变得弯曲。这种现象会影响到智能车的视觉感知和导航精度。
去畸变的基本步骤包括:
1. **相机内参测定**:每个摄像头和镜头组合都有其特定的内参,需要通过棋盘标定图来测定。标定图应包含足够多的角点(通常为正方形格子),并从不同角度拍摄以获取多个视角的数据。
2. **获取矫正参数**:使用上位机软件,用户可以设置图像参数(如角点数、结果图尺寸等),并运行算法计算相机的内参矩阵(cameraMatrix)和畸变系数(distCoeffs)。这些参数随后会被保存,供后续去畸变过程使用。
3. **指针映射优化**:为了提高效率,可以在初始化时将矫正矩阵和畸变系数应用到指针地址上。这样,之后只需通过指针数组访问图像数据,即可快速得到去畸变后的图像,无需每次处理新图像时都重新计算。
4. **去畸变操作**:利用已知的cameraMatrix和distCoeffs,结合图像坐标,可以计算出新坐标,将原始图像的每个像素映射到无畸变的空间。
5. **选择图像类型**:去畸变后的图像可以是灰度图或二值化图,具体取决于应用需求。对于没有内容的部分,可以用特定灰度值(如BlackColor)填充。
6. **视野调整**:去畸变可能导致图像边缘内容丢失,用户可以选择是否保持全图内容,但这可能在某些情况下(如桶形畸变)导致结果混乱。
通过这个教程,读者不仅可以了解去畸变的基本原理,还能学习到如何实际操作去畸变上位机,获取并应用相机内参,从而优化智能车的图像处理性能。值得注意的是,所有采集的图像应来自同一相机和镜头,并保持相同的分辨率,以保证去畸变效果的一致性。
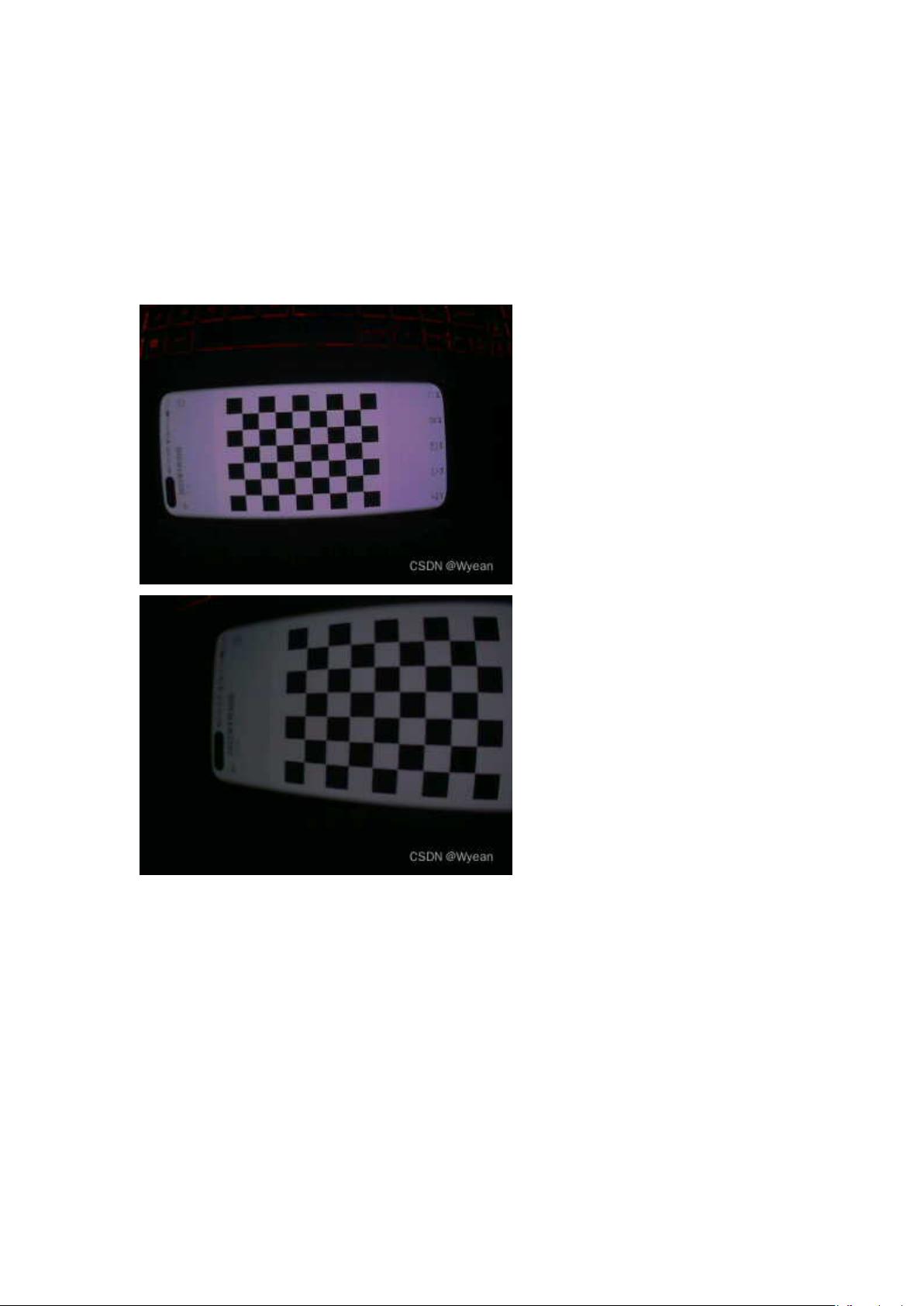
1.棋盘标定图
(1)放置在同一个文件夹中(数量越多越好 1,0 张以上,推荐 50 张左右)
(2)需要将整个棋盘标定图拍摄进去,越清晰越好
编辑
编辑
2.拍摄的赛道图,用于观察去畸变效果
仅用作观察效果,无特殊要求
剩余11页未读,继续阅读
2021-09-14 上传
2021-11-18 上传
2021-09-14 上传
2022-06-24 上传
2024-04-17 上传
2022-06-14 上传
2022-05-17 上传
2021-10-05 上传
2021-09-14 上传

技术分享官
- 粉丝: 1758
- 资源: 401
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新代数控API接口实现CNC数据采集技术解析
- Java版Window任务管理器的设计与实现
- 响应式网页模板及前端源码合集:HTML、CSS、JS与H5
- 可爱贪吃蛇动画特效的Canvas实现教程
- 微信小程序婚礼邀请函教程
- SOCR UCLA WebGis修改:整合世界银行数据
- BUPT计网课程设计:实现具有中继转发功能的DNS服务器
- C# Winform记事本工具开发教程与功能介绍
- 移动端自适应H5网页模板与前端源码包
- Logadm日志管理工具:创建与删除日志条目的详细指南
- 双日记微信小程序开源项目-百度地图集成
- ThreeJS天空盒素材集锦 35+ 优质效果
- 百度地图Java源码深度解析:GoogleDapper中文翻译与应用
- Linux系统调查工具:BashScripts脚本集合
- Kubernetes v1.20 完整二进制安装指南与脚本
- 百度地图开发java源码-KSYMediaPlayerKit_Android库更新与使用说明
