CFD控制装置操作手册:错误代码详解与故障处理
需积分: 46 3 浏览量
更新于2024-07-15
3
收藏 1.05MB PDF 举报
"《那智机器人错误代码列表.PDF》是一份详细的CFD控制装置操作说明书,专为NACHI机器人用户设计。该文档旨在帮助用户理解和处理在使用过程中可能遇到的异常情况。手册首先强调了安全操作的重要性,指出机器人安装、操作和维修必须由受过专门训练的人员进行,并遵守相关法律法规。
章节1详细介绍了发生异常时的处理流程,包括异常监视器的启动、异常信息的显示(如异常名称、发生时间、异常原因及代码,例如"A0004")。异常被分类,以便用户快速识别问题的严重性。对于每种异常,都有详细说明其详情和处理方法,鼓励用户参照指导解决问题。如果显示区域不足以显示所有信息,用户可以使用滚动功能查看。
在某些情况下,如遇到需要进行零件检查或更换的重大异常,手册会提示用户按下"F11 故障排除"键,显示相应的步骤进行维护。此外,"F12 异常解除"键用于直接解除异常显示,或者通过两次"复位/R"操作来完成。
这份文档特别适合那些经常与NACHI机器人打交道的工程师和技术人员,它提供了宝贵的故障诊断和解决工具,有助于提升工作效率并确保设备的正常运行。无论是初次使用者还是经验丰富的操作者,都能从中受益匪浅。"
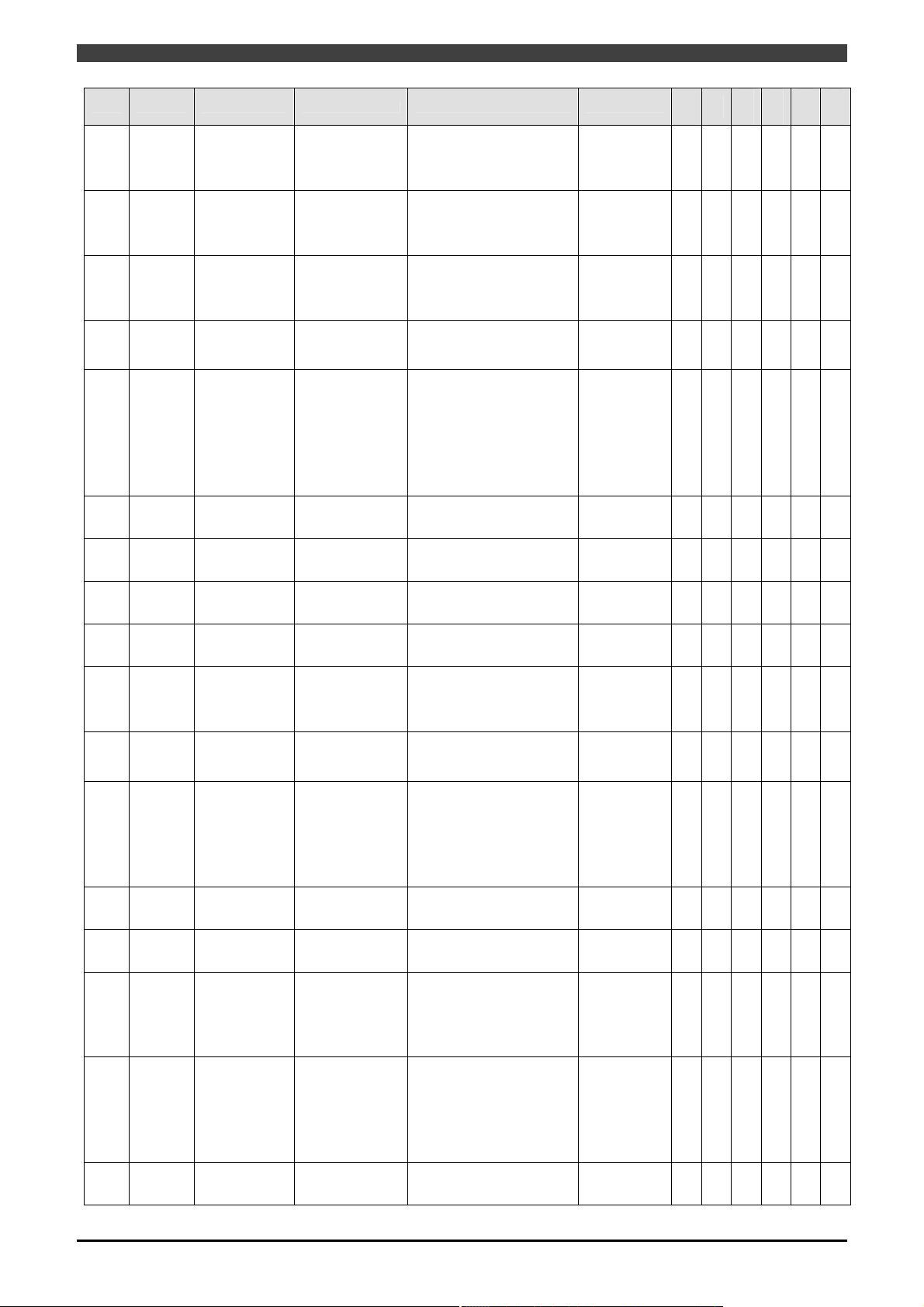
错误代码表
1-7
No
分類
症状
内容
対策
解除
重要度
(教示)
重要度
(再生)
出力
信号
(教示)
出力
信号
(再生)
異常
履歴
(教示)
異常
履歴
(再生)
37 编码器异常 编码器温度过高
当编码器温度异常升高时出
现故障。
(1)请检查并确定有效载荷在标称范围内。
(2)请停止机器人,降低马达温度,然后再重
启。(3)如果故障仍存在,请降低机器人工作
速度。(4)请更换马达和编码器。
在排除异常原因后,使
异常复位。
E E E E on on
38 伺服异常 过负荷
在马达或驱动组件的电流超
过容许值以上时,会发生此
异常。
1. 请检查机器人是否受到干扰。 2.请检查
实际负荷是否超过最大有效负荷值。 3.检查
相关轴是否难以通过制动释放功能来移动。
4.应更换控制装置。
在排除异常原因后,使
异常复位。
E E E E on on
39 伺服异常 过旋转
在马达的转速超过设定值时
发生。
1. 请检查机器人是否受到干扰。 2.请检查
实际负荷是否超过最大有效负荷值。 3.检查
相关轴是否难以通过制动释放功能来移动。
4.应更换控制装置。
在排除异常原因后,使
异常复位。
E E E E on on
40
悬式示教作业
操纵按钮台异
常
悬式示教作业操纵按钮
台内 CPU 异常
内藏在悬式示教作业操纵按
钮台内的 CPU 停止。
请检查 T/P 和连接电缆中是否存在异常。请
关闭并再打开主电源。若仍存在错误,则请
更换 T/P。
重新开启电源。 E E E E on on
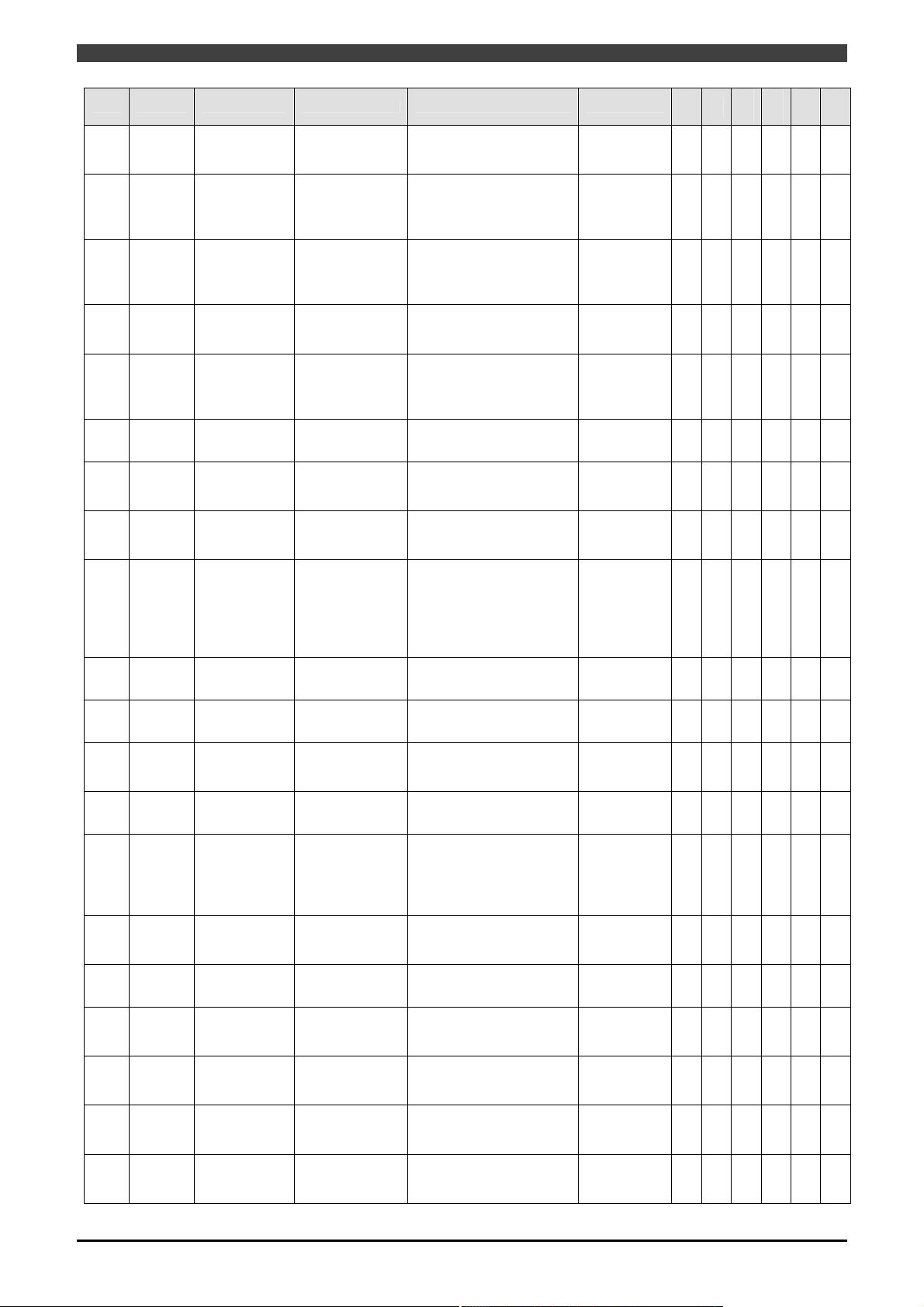
41 编码器异常
Encoder Memory Access
error
Error o ccurs when fault is
detected in the encoder.
(1)Please turn OFF the controller power.
(2)Please replace the motor or the
encoder. (3)Please check the power
supply voltage o f the
encoder refering to
"CONTROLLER MAINTENANCE MANUAL".
(4)Please check the wiring of the
encoder.
在排除异常原因后,再
投入电源。
E E E E on on
42
放大器系统异
常
马达温度上升异常
在马达温度异常上升时检
测。
1. 请检查实际负荷是否超过最大有效负荷
值。 2.应更换控制装置。
在排除异常原因后,使
异常复位。
E E E E on on
43
放大器系统异
常
速度异常
在马达转速异常时,会发生
此异常。
请检查机器人和控制装置之间的电缆是否正
确连接,并确认接点是否正常。
在排除异常原因后,使
异常复位。
E E E E on on
44
放大器系统异
常
马达电源 过电压
在马达的电源电压(P-N)超
过设定值时检测。
请检查机器人和控制装置之间的电缆是否正
确连接,并确认接点是否正常。
在排除异常原因后,使
异常复位。
E E E E on on
46
放大器系统异
常
再生放电电阻 温度上
升异常
在再生放电电阻的温度异常
上升时检测。
应更换控制装置。
在排除异常原因后,使
异常复位。
E E E E on on
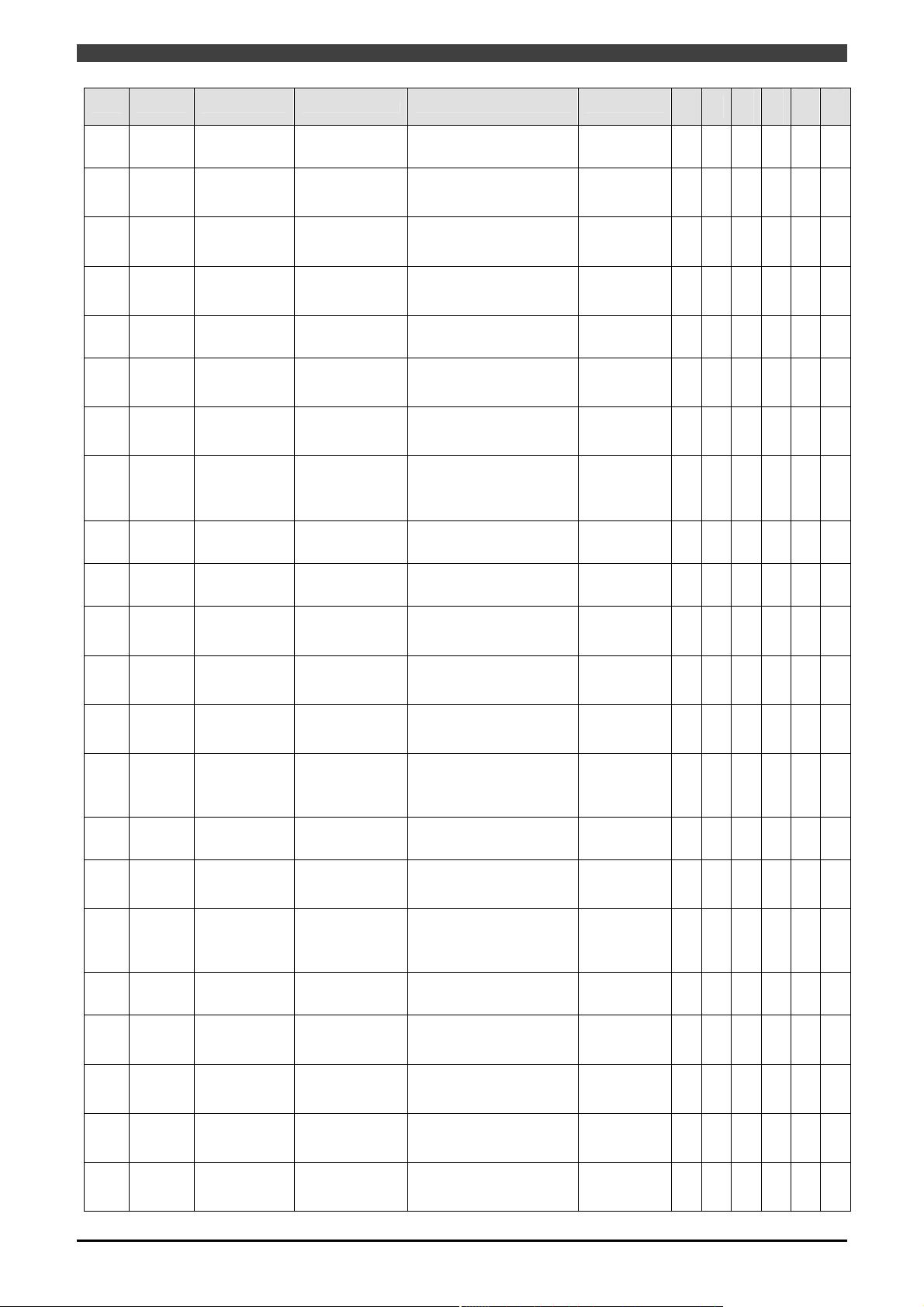
50 编码器异常 编码器 计数器异常
编码器内部出现计数器过流
/欠流时,会发生此故障。
(1)请再次打开控制器电源。(2)请更换马达
或编码器。(3)请根据“控制装置维护篇”,
检查编码器的电源电压。(4)请检查编码器接
线。
在排除异常原因后,再
投入电源。
E E E E on on
51 伺服异常 传输异常
在与编码器的通信数据有异
常以及在编码器的配线断线
时,会发生此异常。
请检查机器人和控制装置之间的电缆是否正
确连接,并确认接点是否正常。
在排除异常原因后,再
投入电源。
E E E E on on
52 编码器异常 编码器 蓄电池异常
在编码器内部的蓄电池电压
降低时,会发生此异常。
1.请执行编码器复位,并再次投入控制装置
电源(是未执行复位操作就无法恢复的异
常)。2.如果再次发生异常或者发生 I1016
时,请检查是否正确连接电池连接器。3.请
检查电池电压(不超过 3.6V)。关于更换方
法,请参照“机器人主体篇”。
在排除故障后,请再次
打开控制器电源。详情
见“SE TUP MANUAL”和
“MANIPULATOR
MANUAL”。
E E E E on on
53 伺服异常 编码器类型无效
当选择了无效的编码器类型
时会出现这种故障。
请检查[Mechine 常量] [马达和编码器] [编
码器类型]。
在排除异常原因后,再
投入电源。
E E E E on on
54 伺服异常 位置偏离
编码器数据变化出现异常
时,会发生此故障。
(1)请根据“控制装置维护篇”,检查编码器
的电源电压。(2)请检查编码器接线。
在排除异常原因后,使
异常复位。
E E E E on on
55 编码器异常
编码器 马达旋转异常
(停电时)
由于电源关闭之前,马达高
速旋转,因此不能正确检测
出编码器的绝对旋转量。(在
编码器内部进行这种检测,
将错误状态发送至控制器。)
1.应再次投入电源(是不再次投入电源就无
法复位的异常)。
在排除异常原因后,再
投入电源。
E E E E on on
56 伺服异常
Encoder pre-load
failure
This failure o ccurs if the
pre-load o peration of the
encoder was n o t correctly
done.
(1)Please confirm the supply voltage of
the encoder refering to "AX controller
maintenan
ce manual".(2)Please confirm
whether the robot manipulator interferes
in something.(3)Please confirm the
wiring of the encoder.
在排除异常原因后,使
异常复位。
E E E E on on
57 编码器异常 编码器 计数状态异常
当编码器的吸收数据发生异
常时,会发生此异常。
1.应再次投入电源(是不再次投入电源就无
法复位的异常)。
在排除异常原因后,再
投入电源。
E E E E on on
剩余61页未读,继续阅读
2020-11-16 上传
2021-09-26 上传
2021-07-14 上传
2021-12-16 上传
2021-09-29 上传
2019-09-15 上传
2021-11-27 上传

wangrurui
- 粉丝: 83
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







