掌握ABB机器人PAPID编程与RAPID模块构建
版权申诉
173 浏览量
更新于2024-06-27
1
收藏 3.03MB DOC 举报
本资源是一份关于ABB J-6型机器人的程序编程教程文档,主要针对6.1任务目标,即学习和掌握PAPID和基本RAPID编程指令。PAPID是ABB机器人的一种高级编程语言,而RAPID则是更底层的编程语言,用于直接控制机器人的动作和逻辑。
在6.2任务描述中,具体步骤包括建立名为test12.24的程序模块,其中创建例行程序main和Routine1,参与者将在main程序中实践基础运动指令操作。通过这个实践环节,用户将理解如何编写、调试、自动运行以及保存自己的RAPID程序,这是机器人编程中的关键技能。
6.3部分介绍了程序模块和例行程序的基础概念。在RAPID编程中,程序由一系列模块组成,每个模块可以包含程序数据、例行程序、中断程序和功能等。主程序main是程序的入口点,位于任意模块中,用于组织和控制整个程序流程。模块之间可以相互引用数据和程序元素,提高代码的组织性和复用性。
操作步骤详细指导了在示教器上进行指令编程的方法,如选择正确的编辑器、定位程序位置、插入指令、设置数据类型,以及使用常量和数学表达式进行赋值等基础操作。通过实际操作,用户将学会如何运用RAPID指令来实现机器人控制的不同功能。
这份文档不仅提供了理论知识,还有实践操作指南,非常适合初学者入门和进阶学习ABB机器人的程序编程,有助于提升编程技能和理解机器人的行为控制机制。
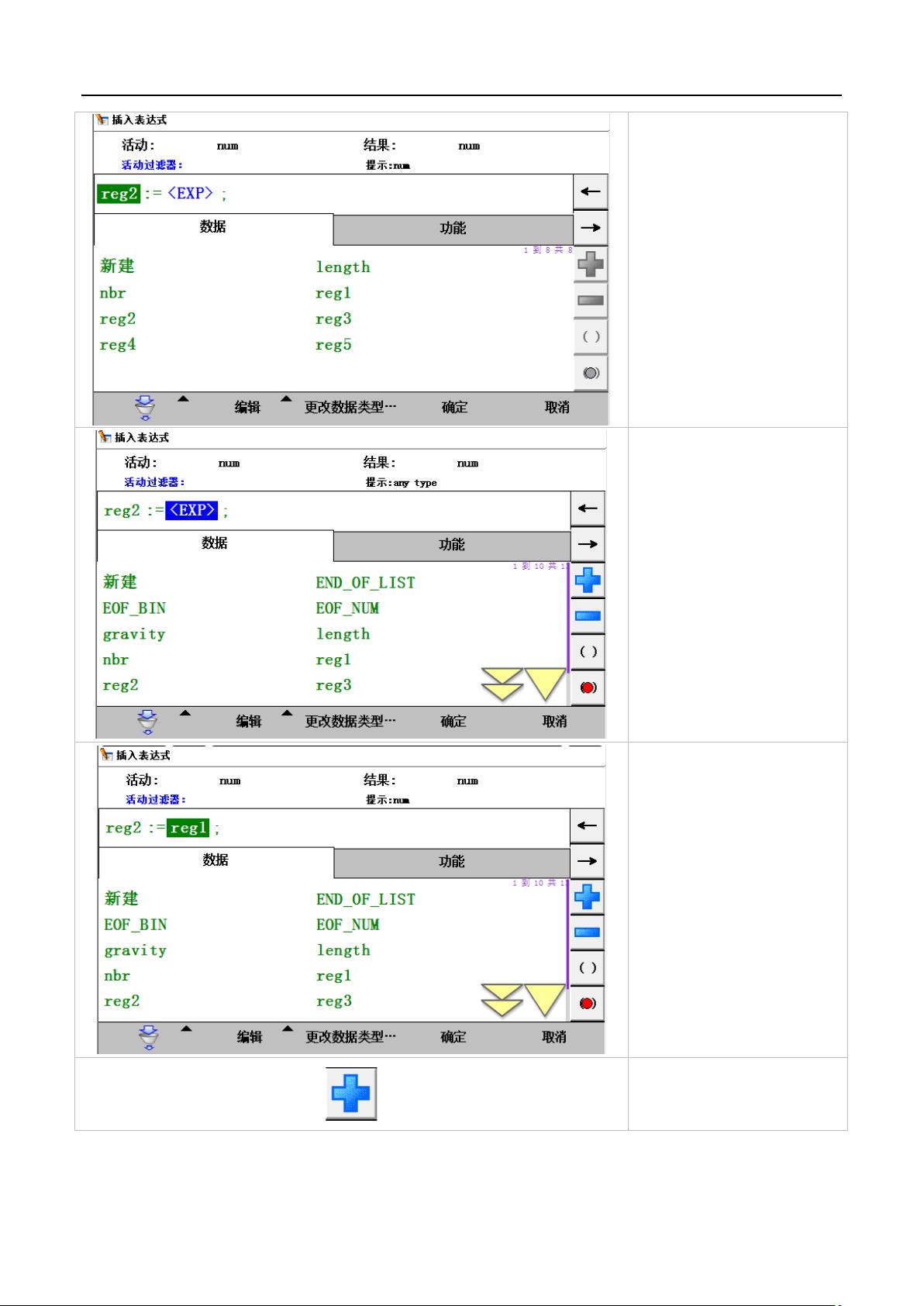
ABB 机器人的程序编程
.
2. 选中“reg2”。
3. 选中“<EXP>”,显示为蓝
色高亮。
4. 选中“reg1”。
5. 单击“+”按钮。

剩余38页未读,继续阅读
156 浏览量
2023-07-11 上传
110 浏览量
2021-10-07 上传
2021-10-03 上传
140 浏览量
114 浏览量

是空空呀
- 粉丝: 199
 我的内容管理
展开
我的内容管理
展开







最新资源
- Oracle Spatial图层创建指南:使用SQL语句
- 广东金融学院机票订购管理系统设计
- IntraWeb与DreamWaver FrontPage结合:使用LayoutManagerHTML和TemplateProcessor
- ABB ACS800变频器操作手册和应用程序指南
- VSS版本控制管理步骤详解
- 掌握论文综述撰写策略:步骤详解与关键技巧
- Delphi函数与属性详解:使用技巧与示例
- 使用IntraWeb构建Web应用的入门指南
- 高手教你玩转电脑技巧:从系统优化到病毒处理
- 单电源供电运算放大器的应用与限制
- Cortex-M3技术参考手册解析
- Freescale汽车网络技术:LIN/CAN/FlexRay解析
- ZigBee方案选择关键因素分析
- RS485选型与应用详解:芯片、电路与协议指南
- 领域驱动设计:精简版——企业软件开发指南
- jQuery基础教程:简化Ajax与DOM操作
