
水泥地面打磨机器人运动控制系统设计水泥地面打磨机器人运动控制系统设计
建筑行业中水泥地面多采用人工配合机械进行打磨平整,工作环境恶劣且工作效率低,而自动打磨机器人可以
代替人工作业、提高工作效率。针对水泥地面打磨机器人,研究其复杂运动中基本运动的控制,提出了水泥地
面打磨机器人运动控制方案。首先建立机器人的运动学模型,并设计实现了基本运动的速度控制算法,然后以
STM32单片机为控制的核心,完成了对水泥地面打磨机器人运动控制系统的设计,实现了机器人复杂轨迹中基
本运动的控制。实验结果表明,机器人在直线运动和转弯运动时,最大定位误差为3.1 cm。验证了该系统对于
机器人基本运动控制的可靠性和稳定性,为类似的机器人的控制提供参考。
0 引言引言
在我国建筑行业中,传统水泥地面打磨主要是由工人手工工作或者配合半自动化机械产品共同协作完成,但是往往造成地
面打磨光整度并不是太好,打磨过程中大量灰尘严重危害了工人健康,对于大面积地面时,工作效率非常低
[1]
。水泥地面打磨
机器人可以有效解决上述难题,可极大提高工作效率,减轻工作人员劳动作业量,消除灰尘对工作人员的伤害
[2]
。而目前比较
成熟的产品往往是由人工扶持的半自动产品,通过对现存的机器进行分析发现有的机型太过于笨重,搬运和更换磨片很费力,
有的机型太轻,磨削力不足,效率低,大部分产品依然没有完成无人自动打磨任务
[3]
。针对以上问题,需研发出能够在少人或
者无人看守的情况下自动工作的打磨机器人,它可以依靠自身的激光雷达构建室内地图,通过运动路径规划、定位导航、运动
控制配合打磨转盘控制,实现建筑水泥地面的自动打磨。
本设计的核心是配合路径规划实现复杂运动中基本运动的控制,其原因在于每一种复杂运动都可拆解为前进、后退、左转、右
转等基本运动的组合,所以对基本运动的准确控制尤为重要。
在本设计中首先对所研究的机器人构建运动学模型,在分析了机器人四种基本运行方式基础上,针对机器人速度控制问题
提出速度控制算法,并通过MATLAB软件完成算法的仿真。在水泥地面打磨机器人基本运动实现过程中是以STM32F103Z为
运动控制系统的主控芯片,通过伺服驱动器驱动电机转动,完成机器人运动控制系统硬件平台的搭建,软件部分以C语言为编
程语言,在Keil μVision5集成开发环境中编程,通过仿真器下载到STM32F103Z芯片,最后通过机器人样机进行实验。
1 机器人运动学模型建立机器人运动学模型建立
为了准确描述机器人在运动过程中位姿信息,对水泥地面打磨机器人的移动车体结构部分进行简化,构建该机器人的运动
学模型。
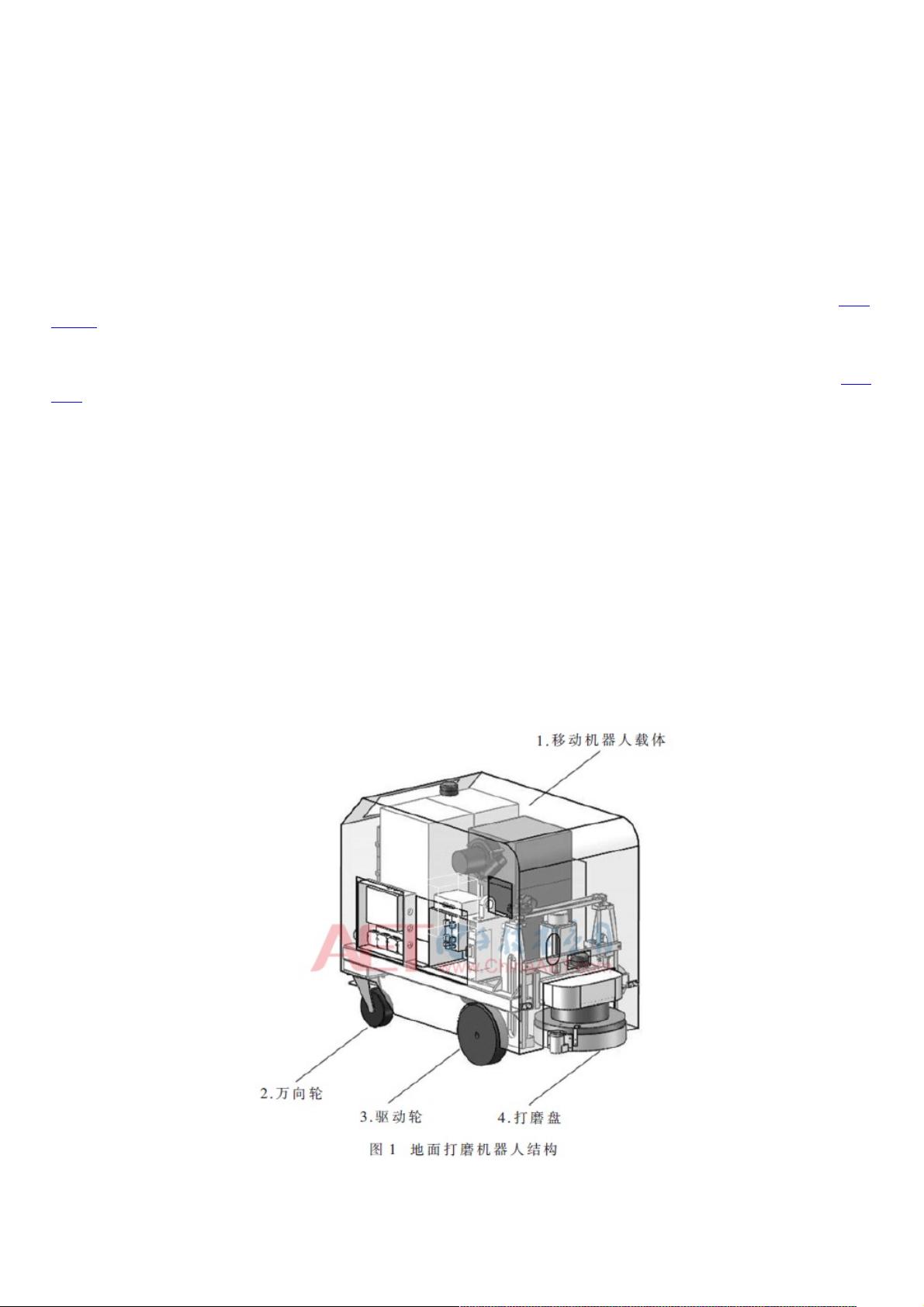
如图1所示,水泥地面打磨机器人可以分为两大部分,第一部分为功能部分,主要是打磨盘以及与之相适应的驱动电机,打
磨转盘与电机之间通过V带进行传动,在驱动电机尾部安装有编码器,通过编码器获得驱动电机的转速信息;另一部分是移动
机器人载体,移动机器人前轮为驱动轮,通过控制驱动轮完成对机器人运动方式的控制,两个后轮是万向轮,只起到支撑作
用。
将上述水泥地面打磨机器人结构进行简化,得到如图2所示的机器人运动学模型。
下载后可阅读完整内容,剩余8页未读,立即下载

weixin_38668672
- 粉丝: 6
- 资源: 907
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


