"基于机器视觉的工业机器人运动控制研究:理论、方法与应用"。
版权申诉
146 浏览量
更新于2024-04-04
收藏 1.62MB DOC 举报
基于机器视觉的机器人运动控制研究pdfdoc.doc涵盖了在工业领域中机器人技术的最新发展。经过50多年的发展,机器人已经成为现代工业的标志之一,然而目前大部分工业机器人仍然使用传统的“示教—再现”方式完成工作,限制了其在生产线中的灵活性。机器视觉作为一种信息获取手段,具有较高的检测精度和广泛的检测范围,因此将其应用于工业机器人可以提高机器人对外部环境的适应能力。
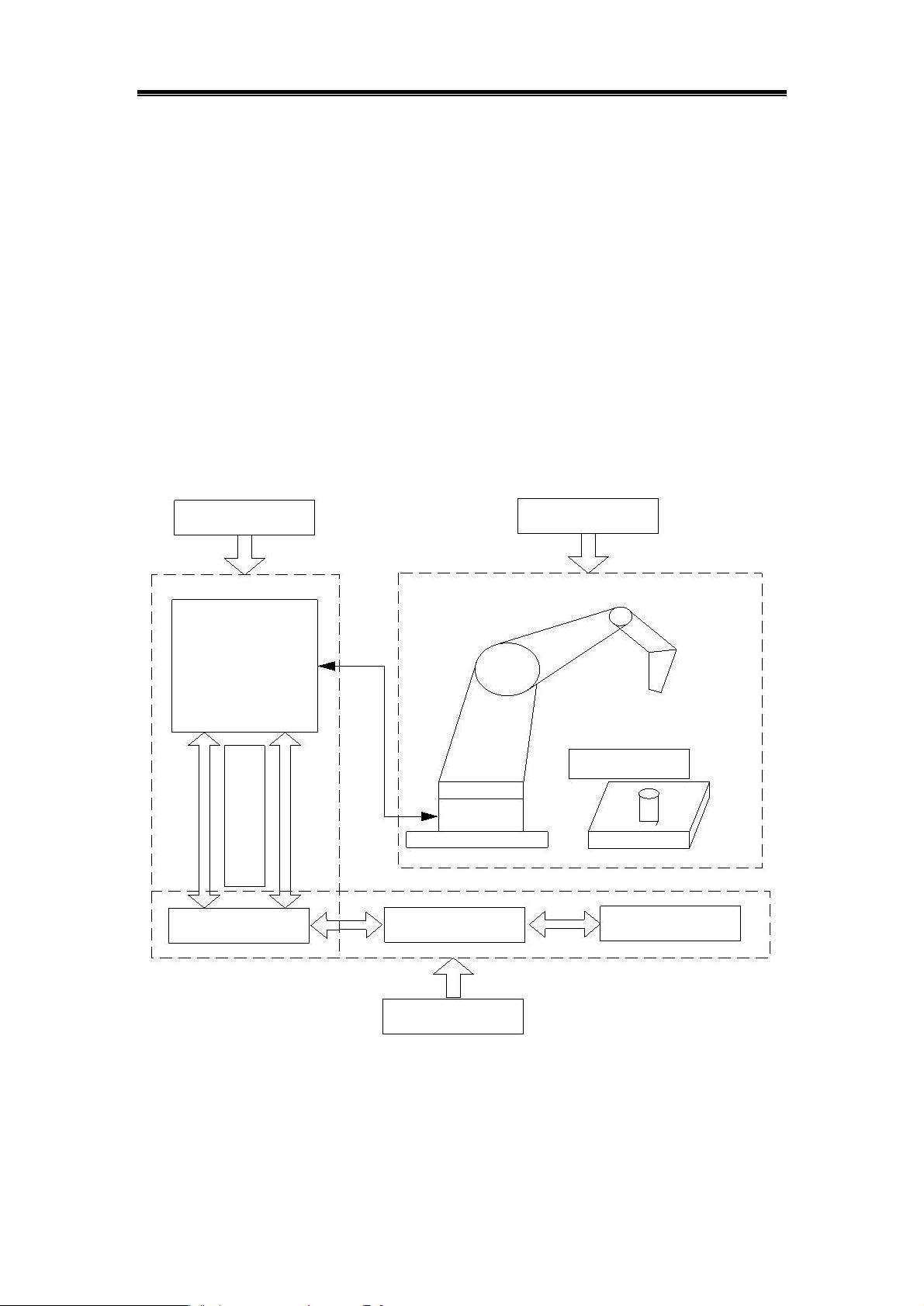
本文以REBOT-V-6R关节型工业机器人系统为研究对象,深入探讨了基于机器视觉的工业机器人运动控制。原有的控制系统功能受限,只能对单一物体进行简单的识别和抓取。通过对机器视觉图像处理技术和机器人运动控制的研究,本文改进了机器人的图像处理算法,实现了对目标的定位和运动控制。
首先,本文对图像处理的理论进行了深入研究,通过对比各种处理方法的效果,改进了机器人的图像处理算法。通过预处理提高图像质量,运用阈值法进行图像分割,进一步进行边缘检测和轮廓提取,最终得到了图像中各物体的轮廓矩,并通过计算轮廓的最小外接矩形得到各物体的质心坐标。
其次,本文对机器人进行了运动学分析,采用了D-H方法对工业机器人进行运动学建模,建立机器人的正向和逆向运动学模型,为机器人的运动控制提供了理论支持。另外,本文还对机器人的轨迹规划进行了研究,采用了典型的轨迹规划方法,如S形加减速规划和PID控制,实现了机器人运动的平稳和准确控制。
最后,本文基于视觉信息对机器人的运动控制进行了实验验证。通过搭建实验平台,验证了改进后的图像处理算法对机器人目标定位的准确性和稳定性,以及运动控制算法对机器人运动的精确性和灵活性。实验结果表明,基于机器视觉的机器人运动控制方法具有较好的实际应用价值,可以为工业机器人的自主定位和运动提供有效支持。
因此,本文的研究为基于机器视觉的工业机器人运动控制提供了一种新的方法和思路,为工业机器人的智能化发展提供了新的思路。未来的研究可以进一步改进图像处理算法,提高机器人的视觉感知能力,同时优化运动控制算法,使机器人在复杂环境中能够更加灵活和高效地完成各项工作。

华北电力大学硕士学位论文
析,计算运动学的正反解,以此为理论基础改进机器人的运动控制程序,对
视觉系统识别的多个工作目标进行连续抓取搬运作业。
各章节的安排如下所示:
第 1章“绪论”,介绍文章的选题背景和意义,课题在国内外的研究现状和
发展动态,阐述了本文的主要研究内容。
第 2章“工业机器人系统及摄像机的标定”,对 REBOT-V-6R工业机器人系
统的基本构成进行了简要说明,建立了摄像机的模型,利用张正友法对摄像机进
行标定。
第 3章“图像处理与目标定位”,针对本文需要对图像处理的各阶段及常规
方法进行了学习研究,对视觉系统的图像处理部分进行改进,完成了多目标的识
别及轮廓的提取,然后利用轮廓的最小外接矩形求得了各目标的质心。
第 4章“工业机器人运动控制”,利用 D- H法为机器人建立运动学模型和
运动学方程,对机器人的运动学正、逆问题进行计算,为机器人的运动控制打下
理论基础。对机器人的一些常用动作模块化,并利用这些动作模块进行机器人搬
运作业程序的编写。
第 5章“目标定位与机器人抓取搬运实验”,应用前文对控制系统的改进,
通过实验得到多物体的质心坐标,并利用这些坐标对目标成功进行了连续抓取搬
运作业,这也验证了物体质心的准确性,实验结果达到了预期的目标。
第 6章“结论与展望”,概述本文的主要的工作内容,并对后续工作进行展
望。
6

剩余57页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-11-20 上传
2021-10-11 上传
2022-11-28 上传
2021-09-18 上传
2022-12-26 上传
2019-09-05 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







