ABB机器人DSQC651板配置与信号定义指南
需积分: 15 59 浏览量
更新于2024-07-04
1
收藏 3.36MB PPTX 举报
"ABB机器人标准I/O扩展板的使用涉及DSQC651板的配置,包括总线连接设定、数字输入输出信号(dil/dol)、组输入输出信号(gil/gol)以及模拟输出信号(aol)的定义。配置过程中,需在‘控制面板’的‘配置-I/OSystem’画面中进行相关操作,如添加新信号并填写对应参数,然后重启以保存设置。DSQC651板是DeviceNet现场总线下的设备,通过X5端口通信。组输入/输出信号允许组合使用多个数字信号,以处理BCD编码的十进制数。"
在ABB机器人的自动化系统中,标准I/O扩展板,如DSQC651,是至关重要的组件,用于与外部设备交互。这个板卡是DeviceNet网络的一部分,DeviceNet是一种基于CAN总线的工业现场总线协议,允许设备之间进行高效的数据交换。DSQC651板通过X5端口连接到DeviceNet,确保了与其他网络设备的稳定通信。
配置DSQC651板的总线连接需要在ABB机器人的控制系统软件中进行。首先,进入“控制面板”,然后在“配置”菜单下选择“I/OSystem”,接着双击“DevicenetDevice”来设定DSQC651模块。在这个阶段,用户需要根据设备参数表输入相关数据,例如设备地址、波特率等,然后保存设置并重启系统以应用更改。
定义数字输入输出信号(dil和dol)是控制机器人对外部信号响应或发送信号的关键步骤。在“I/OSystem”界面的“Signal”部分,用户可以添加新的信号,并设置其参数,如地址、数据类型等。完成设置后,同样需要重启系统使更改生效。
组输入信号gil和组输出信号gol允许用户将多个数字输入输出信号组合成一个逻辑单元,以便处理BCD(二进制编码十进制)编码的数值。例如,gi1可以组合4个地址(1-4)来接收0-15的十进制数,而go1可以组合4个地址(33-36)来输出相同的范围。这在处理复杂的控制逻辑或与编码设备通信时非常有用。
最后,模拟输出信号aol,如ao1,用于输出连续的模拟量,通常用于控制电机速度、位置等。配置过程与dil和dol类似,但可能需要设置更精确的参数,如电压范围、分辨率等。
ABB机器人标准I/O扩展板的配置涉及到深入理解DeviceNet协议,掌握信号定义和参数设置,以及熟悉ABB控制系统软件的操作流程。正确配置这些参数能确保机器人系统与外围设备的顺畅通信,从而实现精准的自动化任务。
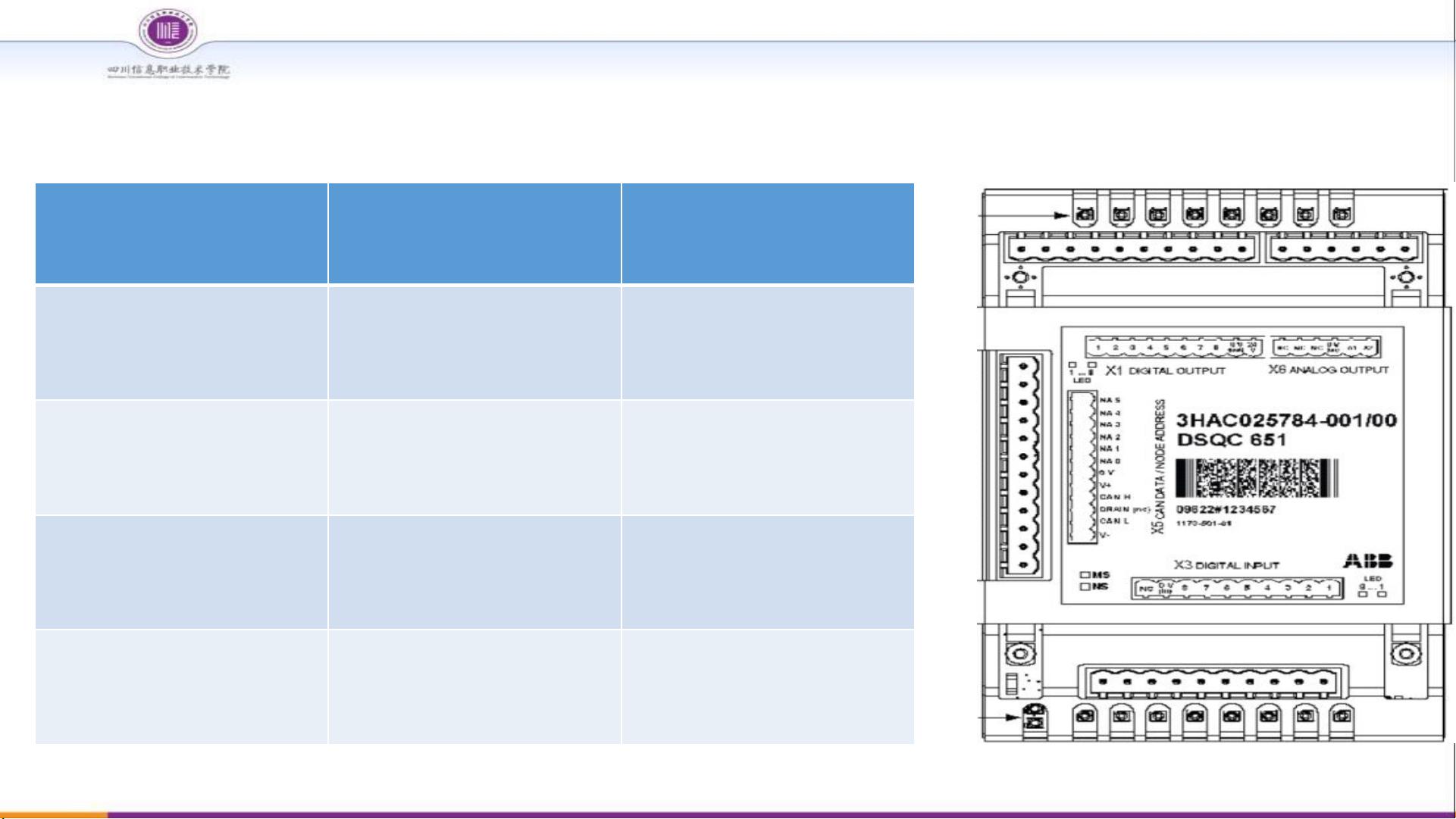
2.3.2 定义数字输入信号 dil
参数名称 设定值 说明
Name di1
设定数字输入信
号的名字
Type of Signal Digital Input
设定信号的类型
Assigned to
Unit
board10
设定信号所在的
IO 模块
Device
Mapping
0
设定信号所占用
的地址
剩余27页未读,继续阅读
658 浏览量
133 浏览量
1914 浏览量
2024-11-06 上传
2024-11-10 上传
189 浏览量
161 浏览量

weixin_42173526
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入探讨V2C控制Buck变换器稳定性分析及仿真验证
- 2012款途观怡利导航破解方法及多图功能实现
- Vue.js图表库vuetrend:简洁优雅的动态数据展示
- 提升效率:仓库管理系统中的算法与数据结构设计
- Matlab入门必读教程——快速上手指南
- NARRA项目可视化工具集 - JavaScript框架解析
- 小蜜蜂天气预报查询系统:PHP源码与前端后端应用
- JVM运行机制深入解析教程
- MATLAB分子结构绘制源代码免费分享
- 掌握MySQL 5:《权威指南》第三版中文版
- Swift框架:QtC++打造的易用Web服务器解决方案
- 实现对话框控件自适应的多种效果
- 白镇奇士推出DBF转EXCEL高效工具:hap-dbf2xls-hyy
- 构建简易TCP路由器的代码开发指南
- ElasticSearch架构与应用实战教程
- MyBatis自动生成MySQL映射文件教程
