RGB-D相机鲁棒内参与外参精确校准方法
需积分: 10 168 浏览量
更新于2024-07-17
1
收藏 5.47MB PDF 举报
本文档探讨了"Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras"(RGB-D相机的鲁棒内在和外在校准),发表在2018年国际知名期刊《机器人学交易》(IEEE TRANSACTION ON ROBOTICS, VOL.34, NO.5, OCTOBER 2018)上。随着机器人技术的发展,尤其是服务机器人和工业应用中,低成本的RGB-D相机因其直观性和广泛的应用成为主要传感器。然而,这些相机通常提供的粗略内在(内参)和外在(外参)校准往往无法满足高精度三维环境重建、物体识别和定位等复杂任务的需求。
作者Filippo Basso、Emanuele Menegatti和Alberto Pretto提出了一种针对通用RGB-D传感器组合的人性化、可靠且准确的校准框架。他们关注的核心是设计一个新颖的两组件误差模型,该模型将不同技术(如结构光3D相机和时间飞行法相机)的RGB-D对中的错误源统一起来。这使得校准过程更加全面,能够有效地估计和补偿由于硬件差异导致的校准误差。
他们的方法提供了几个关键优势:
1. **鲁棒性**:针对各种技术的RGB-D相机,确保在不同条件下的校准稳定性,降低环境变化或设备间差异带来的影响。
2. **易用性**:设计了一个用户友好的流程,使得即使是非专业人员也能轻松地执行高精度的校准。
3. **准确性**:通过精细的误差模型,显著提高校准结果的精度,满足机器人应用对精确度的高要求。
文章详细介绍了校准算法的具体步骤,包括数据采集、特征提取、模型构建以及参数优化,可能还包含了一些实验验证和性能对比,以展示其相对于传统方法的优越性。此外,文中可能还会涉及一些实用技巧和注意事项,以帮助读者更好地理解和应用这一改进的校准框架。
这篇论文为RGB-D相机的校准提供了一个重要的突破,对于提升机器人系统的性能,特别是对于那些对精度要求较高的应用,具有很高的参考价值。阅读者可以从中学习到如何提升深度相机在机器人领域的准确性和稳定性,这对于提升自动化水平和工作效率具有实际意义。
1318 IEEE TRANSACTIONS ON ROBOTICS, VOL. 34, NO. 5, OCTOBER 2018
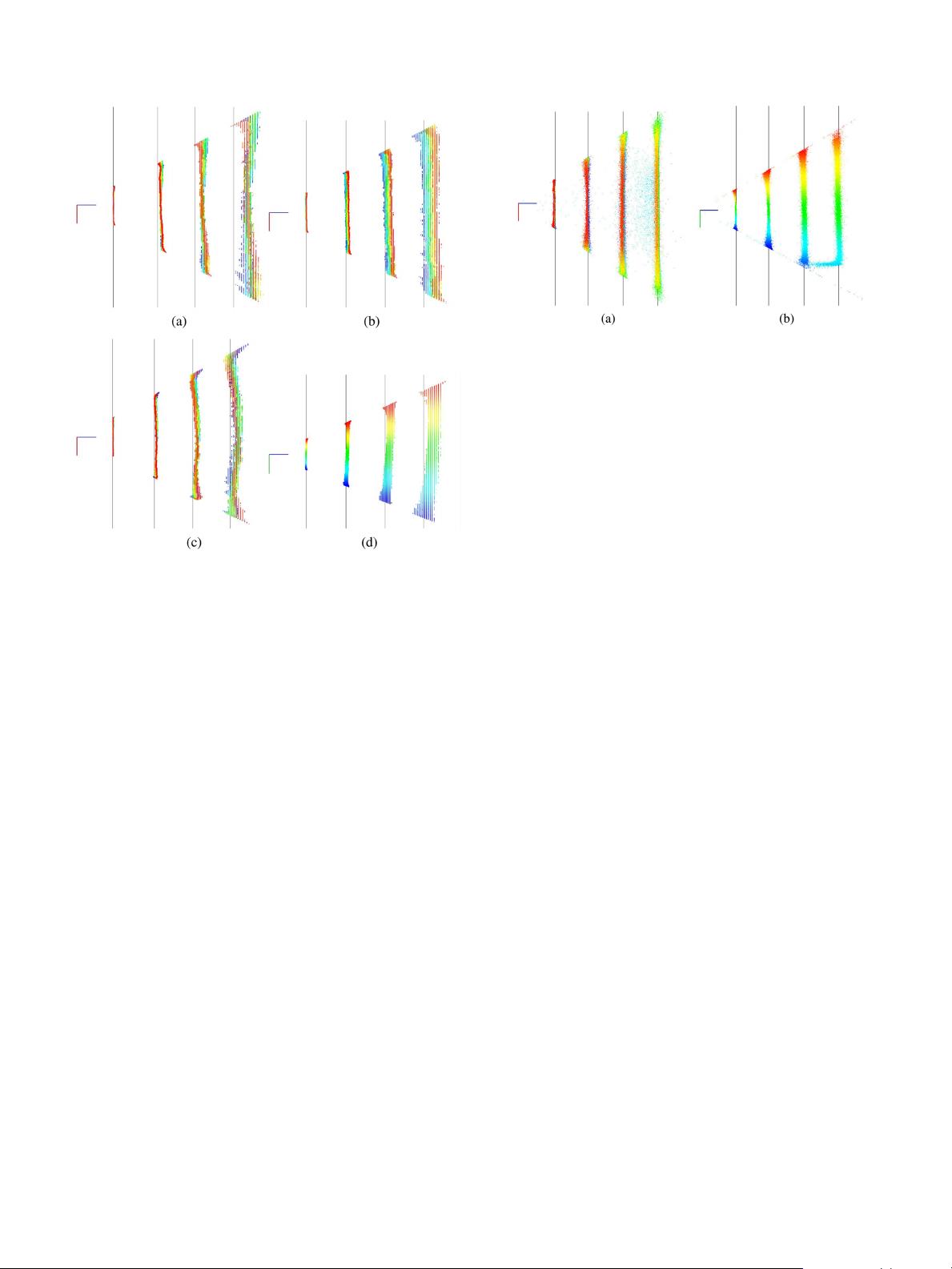
Fig. 1. Top and side views of the point clouds generated by some different SL
depth sensors: two Kinects (
KINECT1A, KINECT1B) and an Asus Xtion Pro Live
(
ASUS). The gray lines represent the ground truth measured with the laser dis-
tance meters, points with different y-coordinates are drawn with different colors.
(a)
KINECT1A—top. (b) KINECT1B—top. (c) ASUS—top. (d) KINECT1B—side.
method is inspired by the work in [24] and [30], while our error
model has been designed taking inspiration from both the error
models presented in [14] and [29].
III. D
EPTH ERROR ANALYSIS
In this section, we introduce our depth error correction model,
derived from an experimental analysis performed using two
popular SL-based depth sensors (the Microsoft Kinect and the
Asus Xtion Pro Live RGB-D cameras) and a ToF sensor (the
Microsoft Kinect 2 RGB-D camera).
To analyze the systematic and random errors in the depth
measurements, we positioned each sensor parallel to a flat wall at
increasing distances. For each position, we collected the sensors
readings (i.e., the depth images and the generated point clouds)
while measuring the real distances (i.e., the ground truth) using
two high precision laser distance meters [e.g., Fig. 12(a)]. Some
qualitative results of such analysis are r eported in Figs. 1 and 2.
From our analysis, we noticed the following statements.
1) In the case of the SL sensors, the surfaces defined by
the point clouds are not properly planar as they should
be, and this “local distortion” effect becomes more
accentuated for increasing distances (this is the myopic
property defined in [30]). Moreover, each sensor has
a different “distortion pattern.” The ToF sensor is also
affected by similar local distortion effect, but to a lesser
extent (typically less than 1 cm).
Fig. 2. Top and side views of the point clouds generated by a Kinect 2 ToF
camera (
KINECT2). The gray lines represent the ground truth measured with
the laser distance meters, points with different y-coordinates are drawn with
different colors. Note that the cloud on the right frames a part of the floor too.
(a)
KINECT2—top. (b) KINECT2—side.
2) The average depth of each point cloud is not generally
correct and, in the case of SL sensors, sometimes even the
average orientation is wrong.
3) The quantization error for the SL sensors becomes not
negligible for increasing distances. ToF sensors are
affected by a negligible quantization error.
3
The effect of 1) is to produce a local alteration of an object
shape, while 2) is a systematic bias in the measurements.
In this paper, we aim to remove both 1) and 2), while it is
usually not possible to remove the quantization error 3) of SL
sensors.
4
In the following, we refer to these error components as distor-
tion error and global error, respectively. These errors in the case
of SL sensors arise from a combination of two main sources:
The radial and tangential lens distortion of the camera used
for stereo triangulation [21], and the misalignment between the
pattern projector and the camera. In the case of ToF cameras,
there are different sources of errors that contribute to the distor-
tion error, among others the built-in pixel-related errors and the
amplitude-related errors, while the global error arise from the
so called wiggling error that appears due to irregularities in the
internal modulation process [8]. Our method does not directly
address other ToF related sources of errors, such as multipath
interference and reflectivity related deviations.
In order to analyze the distortion error trend, we compared
the measured point clouds with the planes that best fit to them
(some results are reported in Fig. 3(a), where we used three SL
sensors and one ToF sensor). In particular, for each incoming
point cloud, we computed the root-mean-square (RMS) error on
the (signed) distance between the plane and the points. It can be
3
Continuous-wave-based ToF sensors like the Kinect 2 measure the depth by
means of a phase differences between an emitted sinusoidal light wave signal
and the backscattered signals received. This phase is evaluated in closed-form
using four equally spaced samples [10]: The quantization error, that is mainly
due to the precision used in storing the samples, is usually neglected.
4
In SL-based depth sensors, the quantization error originates from the discrete
nature of the disparity map used to extract the depth: This error is commonly
mitigated by means of subpixel stereo matching algorithms, unfortunately these
algorithms require to access low-level data that is usually not accessible from
the user side.
剩余17页未读,继续阅读
2021-06-28 上传
2021-05-11 上传
2022-07-14 上传
2009-12-28 上传
2021-06-01 上传
2019-01-09 上传
2014-11-11 上传
2013-09-02 上传
2020-10-02 上传

Henryliupicker
- 粉丝: 4
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
