ARM Linux GPIO模拟SPI时序解析
"在ARM Linux下使用GPIO模拟SPI时序详解"
在ARM Linux系统中,使用GPIO模拟SPI时序是一种常见的方法,特别是在没有内置SPI控制器的硬件平台上。SPI(Serial Peripheral Interface)是一种高速、同步、全双工通信协议,常用于连接微控制器和其他外部设备,如传感器、存储器和显示模块等。SPI接口由四个基本引脚组成:SSEL(片选)、SCLK(时钟)、MOSI(主机输出,从机输入)和MISO(主机输入,从机输出)。
**一、SPI接口概述**
SPI接口的工作方式主要为主从模式,其中主机控制时钟和数据传输,从机根据时钟信号接收或发送数据。SSEL是选择特定从机的信号,SCLK提供同步时钟,MOSI和MISO用于数据交换。SPI时序可以通过改变时钟极性和相位来适应不同设备的需求,这两个参数分别用CPOL和CPHA表示:
- **CPOL(Clock Polarity)**:时钟极性,定义了时钟在空闲状态时的电平。CPOL=0时,时钟空闲时为低电平;CPOL=1时,时钟空闲时为高电平。
- **CPHA(Clock Phase)**:时钟相位,决定了数据是在时钟的上升沿还是下降沿采样。CPHA=0时,数据在时钟的上升沿被采样;CPHA=1时,数据在下降沿被采样。
**二、SPI时序的四种模式**
根据CPOL和CPHA的不同组合,SPI有四种工作模式:
1. **模式0 (CPOL=0, CPHA=0)**:时钟空闲时为低电平,数据在时钟的上升沿被采样。
2. **模式1 (CPOL=0, CPHA=1)**:时钟空闲时为低电平,数据在时钟的下降沿被采样。
3. **模式2 (CPOL=1, CPHA=0)**:时钟空闲时为高电平,数据在时钟的上升沿被采样。
4. **模式3 (CPOL=1, CPHA=1)**:时钟空闲时为高电平,数据在时钟的下降沿被采样。
**三、GPIO模拟SPI**
在没有硬件SPI控制器的情况下,开发者可以利用GPIO引脚模拟SPI通信。这需要通过编程精确控制GPIO的电平变化来模拟SCLK、MOSI和MISO的信号。通常,需要以下步骤:
1. 配置GPIO引脚为输出模式,模拟SCLK、MOSI信号。
2. 配置GPIO引脚为输入模式,用于接收MISO信号。
3. 执行SPI通信协议,根据所选模式控制时钟极性和相位。
4. 使用软件定时器或中断来控制时钟周期,确保数据传输的同步。
5. 通过循环或计数器控制数据的传输速率。
**四、Linux下的GPIO驱动**
在Linux系统中,可以使用`sysfs`接口或者直接编写内核驱动来操作GPIO。例如,使用`sysfs`,可以通过读写`/sys/class/gpio`目录下的文件来配置和控制GPIO。对于更复杂的操作,如模拟SPI,可能需要编写内核驱动,将GPIO驱动扩展为支持SPI协议。
**五、总结**
通过GPIO模拟SPI时序,开发者可以在没有硬件SPI控制器的平台上实现SPI通信。这种方法虽然比硬件SPI控制器更为复杂,但具有较高的灵活性,可以根据实际需求调整时序参数和通信速度。在实际应用中,需要考虑系统的实时性、功耗以及代码的复杂度等因素。
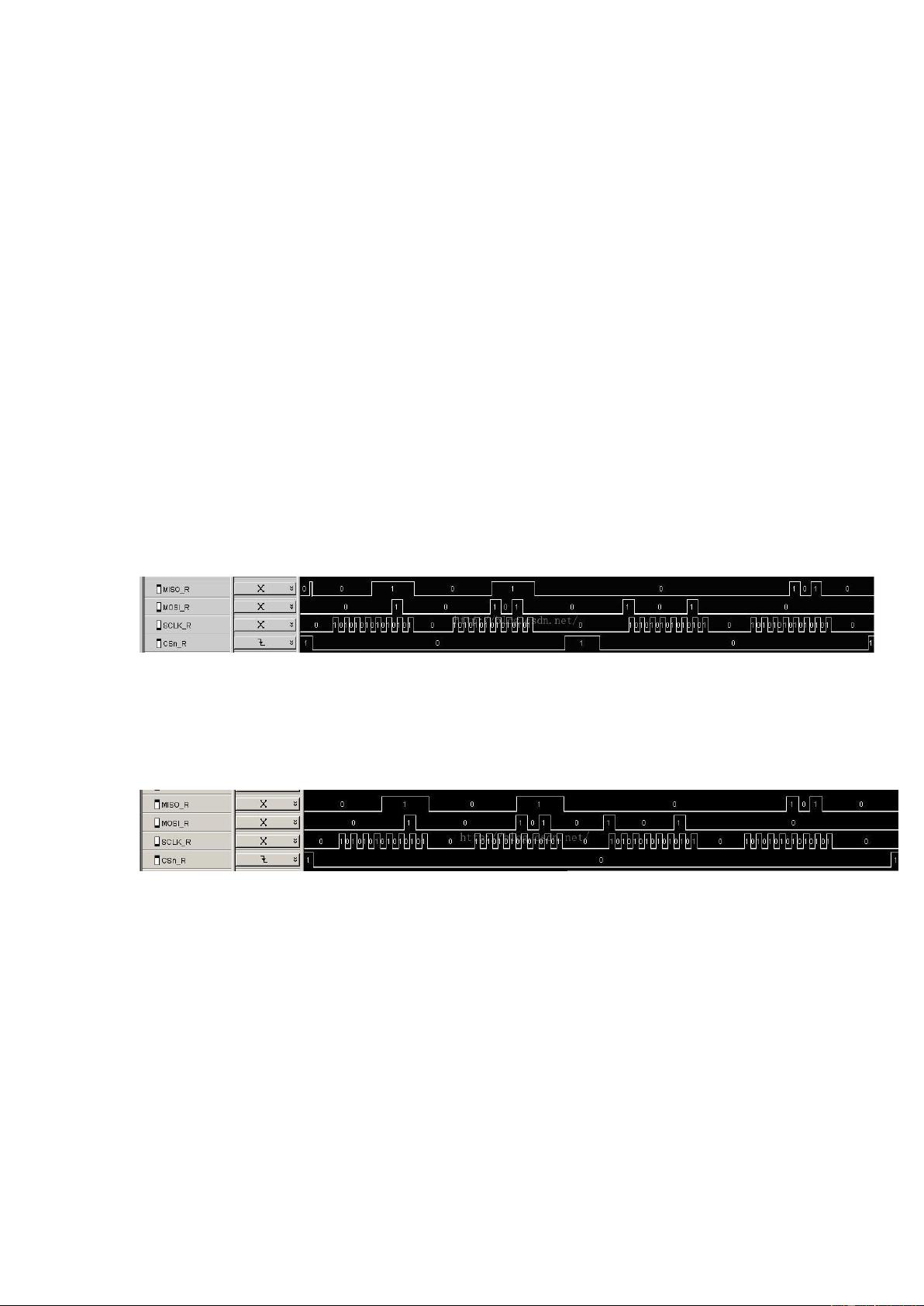
再进一步的说明模式 4。当 SPI 为使能状态,而且发送 FIFO 内有有效数据时,设置 SSEL
信号为低表示开始传输数据。半个 SCLK 时钟周期后,Master 和 Slave 数据在各自的传输
线上有效。同时,时钟 SCLK 从 1 个下降沿开始有效。数据在 SCLK 时钟的上升沿被捕获,
在时钟的下降沿被传送,传输完成后 SSEL 恢复为高电平。
三、 SPI 访问寄存器模式
常见的 SPI 访问寄存器模式有 3 种,分别是 SingleAccess(单次访问)、Burst Access(突
发访问)、FIFO Access(FIFO 访问)。
SingleAccess:通过写访问发送一个地址字节后跟一个数据字节,或者发送一个地址字节,
再通过读访问接收一个数据字节。发送帧时 SSEL 为低,发送完最后一个字节后 SSEL 变
为高。如下图,将 0x0A 写到寄存器 0x02 上,再从该寄存器上读其值。
W + addr. 0x02 Data: 0x0A R + addr. 0x02 Data:
注意:SSEL 第一次为低电平使能时,MISO 变为高电平,然后立即变为低电平,这表示从
设备芯片已经装备好(Thefirst time CSn goes low, MISO goes high and then low again
immediately,indicating that the chip is ready.)。
Single Byte Access (Write and Read)
BurstAccess:一个地址字节后跟多个数据字节。在每个数据字节之间地址字节会在内部自
动增加,并且片选信号 SSEL 在发送帧时为低电平,在每个数据字节之间也保持低电平,
当发送完最后一个字节后变为高电平。如:
BYTE xdata regValues[] = {1,2,3};
halSpiWriteBurstReg(0x00, regValues,sizeof(regValues));
halSpiReadReg(0x00);
halSpiReadReg(0x01);
剩余18页未读,继续阅读
2020-12-05 上传
2021-09-10 上传
点击了解资源详情
2022-08-04 上传
2018-02-09 上传
2010-01-19 上传
点击了解资源详情
点击了解资源详情

叮咯咙咚呛36
- 粉丝: 167
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
