利用摄像头与激光笔自制简易测距仪
"基于摄像头的激光测距仪DIY教程"
本文介绍了一种创新的方法,通过利用低成本的材料和设备,如摄像头和激光笔,来自制激光测距仪。这种方法特别适用于那些对重量有严格限制的设备,比如微型空中机器人。传统的测距组件,如超声波、红外线或专业激光测距仪,虽然效果良好,但在重量敏感的应用中可能不理想。通过结合现有的摄像头,可以实现功能扩展,同时避免额外增加重量。
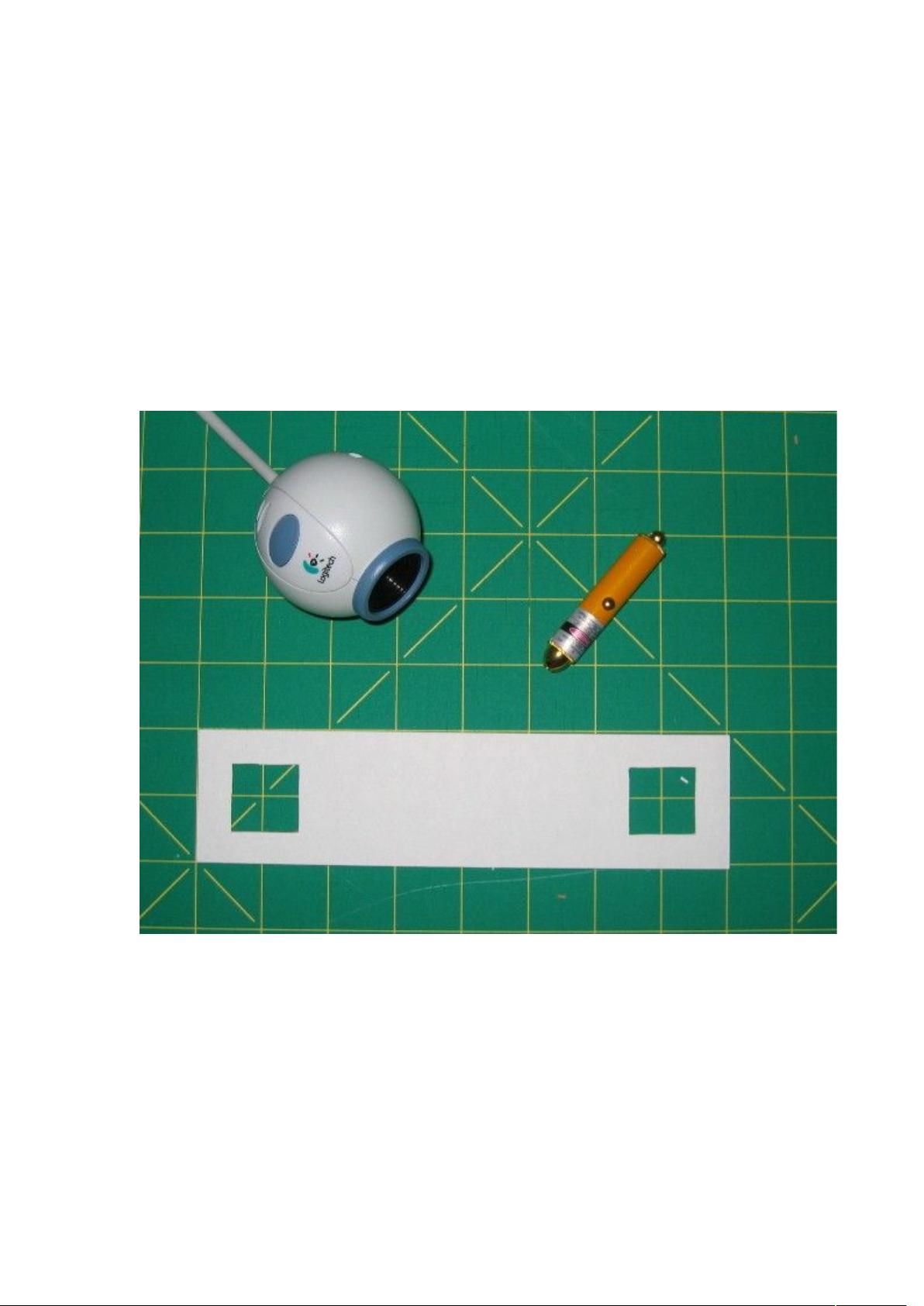
该DIY项目的基本思路是利用一个激光笔发射激光束,将其投射到目标物体上,然后由摄像头捕捉到反射回来的激光点。由于摄像头的光学特性,激光点在图像中的位置与目标物体的距离有关。通过精确计算激光点相对于摄像头中心的位置,可以推算出目标距离。
工作原理的关键在于理解几何关系和光学原理。假设激光束平行于摄像头的主光轴,当激光点出现在图像中时,其相对于中心的位置(以像素计)可以转换为实际的距离。公式涉及摄像头与激光器之间的固定距离(h)、激光点在图像上的像素位置(pfc)以及单个像素对应的弧度值(rpc)。考虑到实际对齐可能存在的误差,还需要一个弧度补偿值(ro)。
通过以下公式可以计算目标物体的距离D:
\[ D = h \cdot \frac{pfc}{tan(\frac{rpc + ro}{2})} \]
要实现这一计算,首先需要测量并确定固定参数h,然后在图像处理中找到激光点的位置(pfc),计算出对应的弧度(rpc),并进行必要的对齐误差校正(ro)。一旦这些值确定,就可以实时地从摄像头的图像中提取数据,快速计算目标物体的距离。
这个方法的优点在于它的简便性和成本效益。通过利用现有的摄像头,不仅减少了硬件成本,还使得系统更轻便。此外,由于计算过程相对简单,这种方法适合于需要快速响应的机器视觉应用。
这个基于摄像头的激光测距仪DIY项目展示了如何将普通摄像头转变为一种功能强大的测距工具,这对于机器人避障、定位以及其他需要精准距离感知的场景具有很大的潜力。通过深入理解和实践这种技术,爱好者和开发者可以进一步探索和优化这一系统的性能,以适应更多复杂的应用环境。
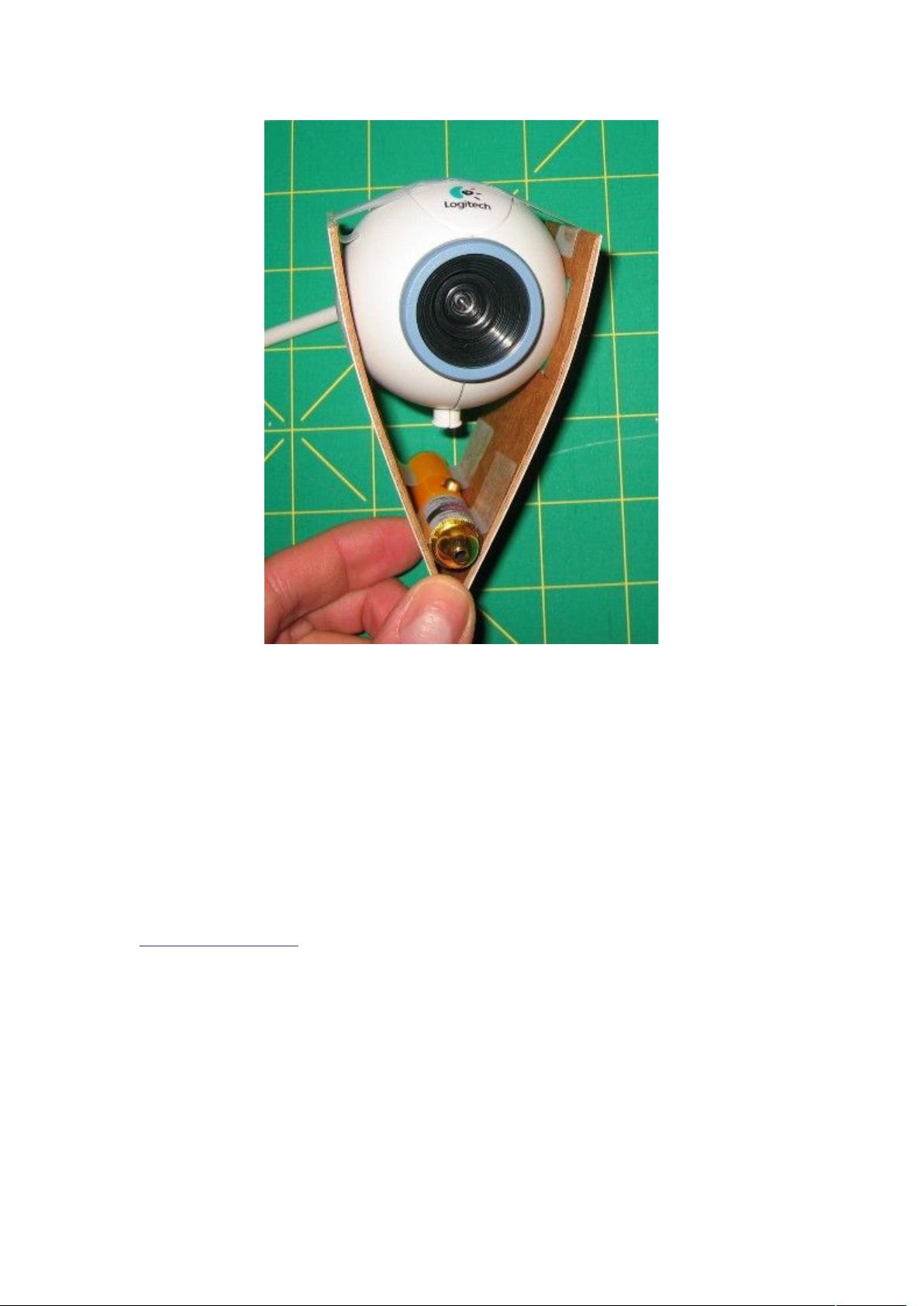
我组装的测距仪是这样的
剩余32页未读,继续阅读
2017-05-04 上传
2011-04-18 上传
2023-02-22 上传
2023-06-30 上传
2023-05-12 上传
2023-02-22 上传
2023-10-30 上传
2023-05-10 上传

WTFRobot
- 粉丝: 33
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
