CANoe入门教程:安装与CANdb++操作详解
需积分: 50 165 浏览量
更新于2024-07-18
3
收藏 3.82MB DOCX 举报
CANoe教程是针对汽车电子行业的一款重要工具,由Vector公司开发,用于总线分析。本文将带你逐步了解CANoe的基础应用,主要以CANoe 7.6版本为例,适用于其他版本的类似操作。
首先,安装CANoe的过程相对简单,需要先安装驱动程序,然后安装软件。确保硬件连接,如CANcaseXL,它包含高速CAN (251)、LIN (7269) 和低速CAN (1054) 等模块。由于CANcaseXL支持两路通讯,可通过灵活配置piggy进行适配。
在软件界面,你可以通过File->NewConfiguration新建工程模板,如CAN_500kBaud.tcn,设置波特率为500Kbps,并保存配置。接下来,使用CANdb++Editor工具对总线网络进行详细设计。这个工具允许定义网络节点、消息和信号。
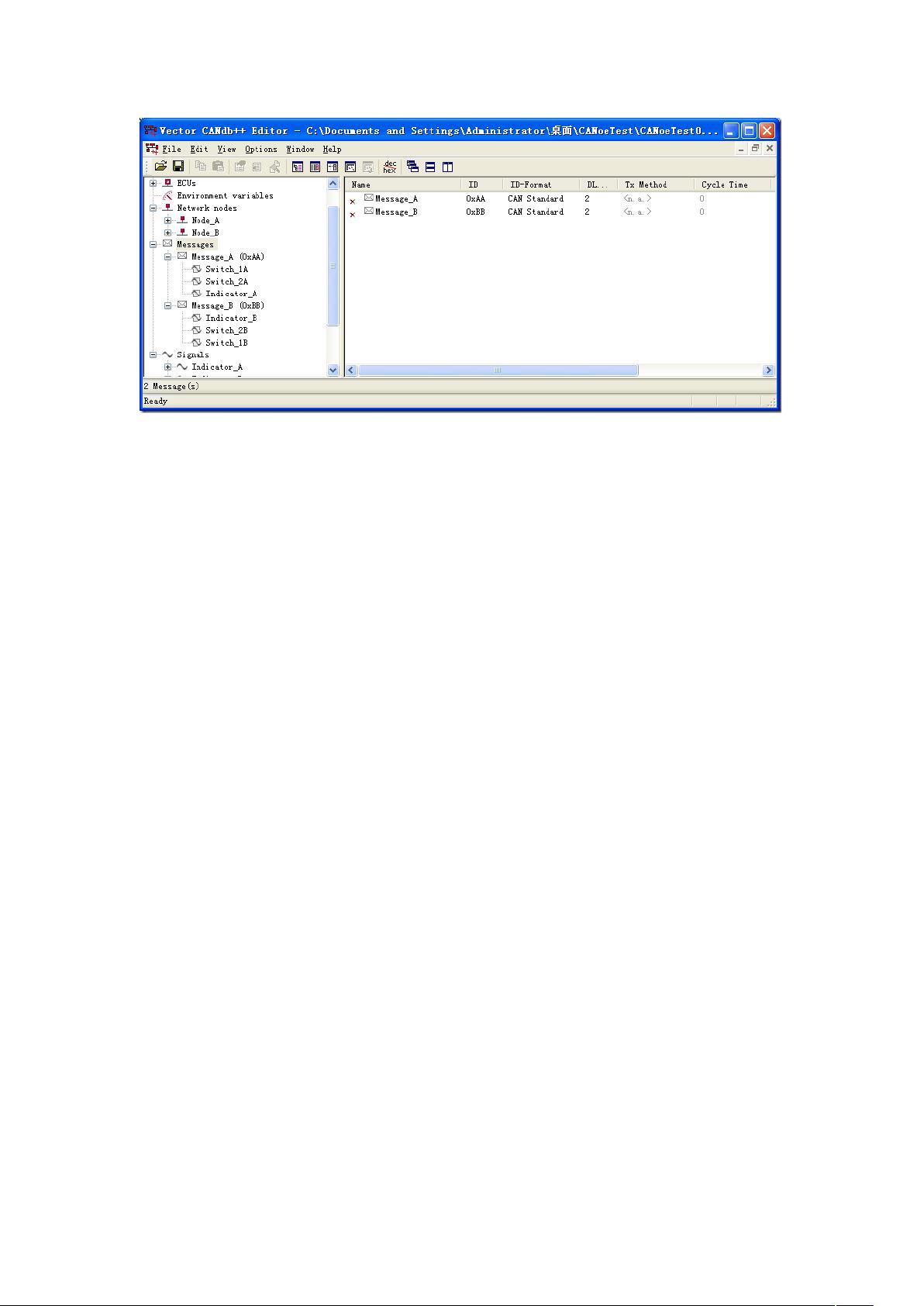
在网络节点管理方面,通过右键点击Networknodes并新建,如Node_A和Node_B,只需填写节点名称即可。定义好节点后,进入消息部分,右键Messages->New,定义消息的名称、ID、DLC等参数,并在Transmitters中指定发送节点,例如,将Message_A设置为从Node_A发出。
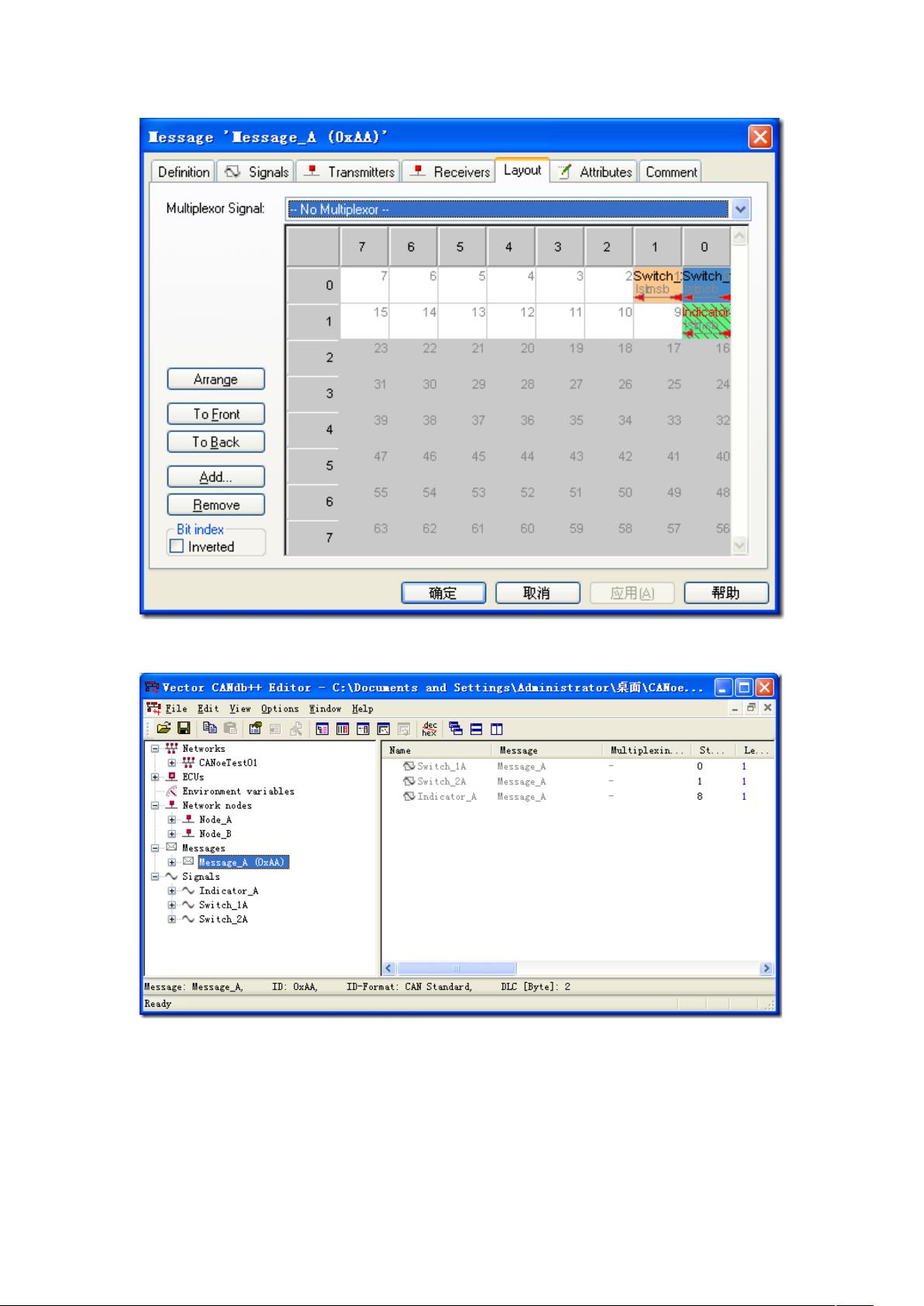
信号的创建同样重要,右键Signals->New,填写信号名称、位宽、类型等信息。信号需与消息关联,这可以通过拖放功能将信号添加到对应的消息中。在此过程中,要注意区分Intel模式和Motorola格式,它们对于表示开关信号的不同方式:
- Intel模式通常使用逻辑1表示“开”状态,逻辑0表示“关”状态,这种方式更直观易懂。
- Motorola格式则相反,逻辑0表示“开”,逻辑1表示“关”。
通过以上步骤,你将能够熟练地使用CANoe进行汽车电子总线的模型设计和分析,这对于理解和调试汽车电子系统至关重要。随着项目的推进,你可能还会学习到高级功能,如数据流分析、故障模拟和测试脚本编写等,以提升工作效率和诊断能力。
剩余42页未读,继续阅读
2019-07-23 上传
2022-07-14 上传
2011-03-02 上传
2022-07-15 上传
2013-09-09 上传
2023-06-11 上传
2022-07-15 上传

leming84
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
