基于SP200的绕线转子电动机正逆转PLC控制设计
52 浏览量
更新于2024-06-24
收藏 380KB DOC 举报
"这篇毕业论文主要探讨了基于SP200的绕线转子电动机正逆转控制程序设计,涉及PLC技术、电机控制、上位监控系统等多个方面。"
在20世纪60年代,PLC(可编程逻辑控制器)的诞生替代了传统的继电器控制,逐渐在全球范围内普及并不断进化。随着计算机技术、信号处理和控制技术的发展,PLC功能不断丰富,不仅能处理开关量,还能处理模拟量和运动控制。在本文中,作者关注的是PLC在绕线转子电动机正逆转控制中的应用。
绕线转子电动机在结构上与普通异步电动机有所不同,其转子由分布式绕组构成。这种电机常用于需要大启动转矩的场合,如起重机。通过调整转子绕组的电阻来改变转差率,从而改变电动机的转矩。在启动时,转子绕组串联一个可变电阻,启动后逐步减小阻值至零。电阻值的选择与电机性能密切相关。
论文第二章详细阐述了绕线转子电动机正逆转控制系统的硬件组成,包括控制系统的基本结构和I/O分配,以及接线图设计。硬件部分可能包括SP200 PLC、电机驱动器、传感器、电源和操作面板等组件,这些组件共同构成了电动机正反转的物理基础。
第三章主要讨论了控制程序的设计,包括程序流程图、时序图以及设计思路。梯形图程序设计是PLC编程的核心,它通过逻辑指令来控制电机的启动、停止、正转和反转。程序流程图和时序图则直观地展示了控制逻辑的执行顺序和时间关系。
第四章聚焦于上位监控系统的构建,PLC与上位监控软件的通讯是关键,使得操作员可以通过图形界面监视和控制电机状态。上位监控系统通常采用组态软件进行设计,能实时显示电机运行参数,并提供故障报警和历史数据记录功能。
第五章详细介绍了系统的调试过程和结果分析,调试过程中可能遇到的问题包括电机启动不畅、转向错误或通信异常等,这些问题需要通过调整程序或硬件设置来解决。最后,作者分享了课程设计的心得体会,总结了整个设计过程的经验和教训。
这篇论文深入探讨了基于SP200的绕线转子电动机正逆转控制系统的硬件配置、程序设计和监控系统的实现,为相关领域的工程实践提供了理论和技术支持。
7
第 4 章 绕线转子电动机正逆转监控系统设计
4.1 PLC 与上位监控软件通讯
实验室仿真,利用了 OMRON 的 PLC 进行仿真。
接好线路,按下 SFB,X1 来信号,Y5 信号输出,PL1 灯亮,按下 PB2,即给 X2 来一个脉
冲信号,PL2 灯闪亮,说明 MC3 动作,正转全电阻启动。然后定时十秒后,Y3/Y1 都有
输出,说明 MC3/MC1 动作,半电阻启动 PL2 继续闪亮,再过十秒,Y3/Y2 有输出,说
明 MC3/MC2 动作,电动机正转运行,此时按下 PB3 没变化。
按下 PB1,即给 X1 一个脉冲,Y5 亮,即停止运转。
按下 PB3,即 X3 来个脉冲,Y3/Y6 有输出,即 MC4 动作,PL2 闪亮, 说明逆转全电阻
启动。然后定时十秒后,Y4/Y1 都有输出,说明 MC4/MC1 动作,半电阻启动 PL2 继续
闪亮,再过十秒,Y4/Y2 有输出,说明 MC3/MC2 动作,电动机逆转运行,此时按下 PB2
没变化。
按下 PB1, 即给 X1 一个脉冲,Y5 亮,即停止运转。
如果运转时断电,即 X0 有脉冲信号,T0 开始定时,如果在 5s 内恢复供电,T0 被复
位,系统继续工作, 如果在 5s 后恢复供电,须按 PB2 或 PB3 重新启动电机重新启动。如
果热继电器动作时,即 X6 来脉冲,电动机停止运转,Y11 有输出,即发出警报,喇叭 Bz 响,
热继电器复位后,BZ 停响,恢复正常操作状态。
4.2 上位监控系统组态设计
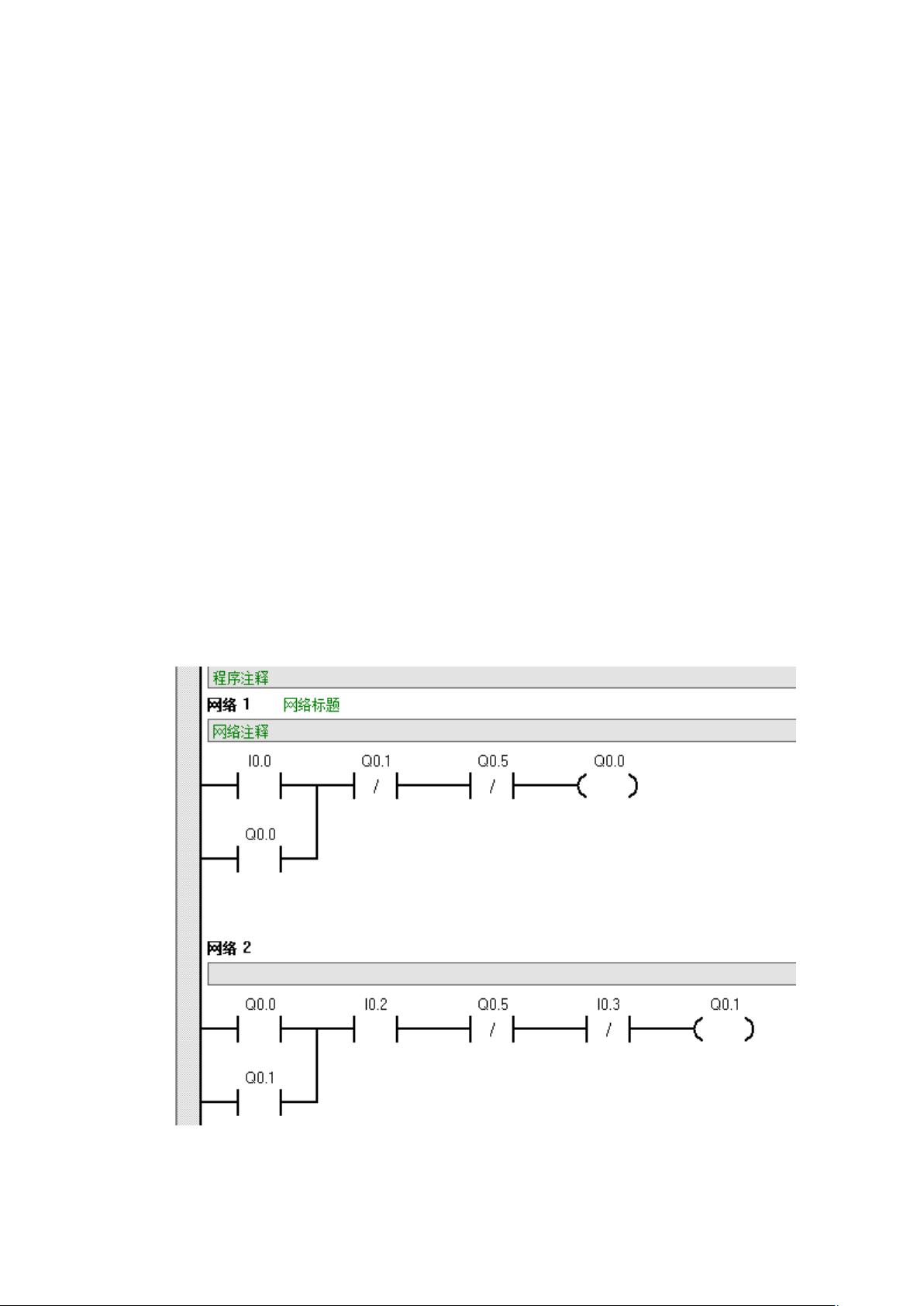
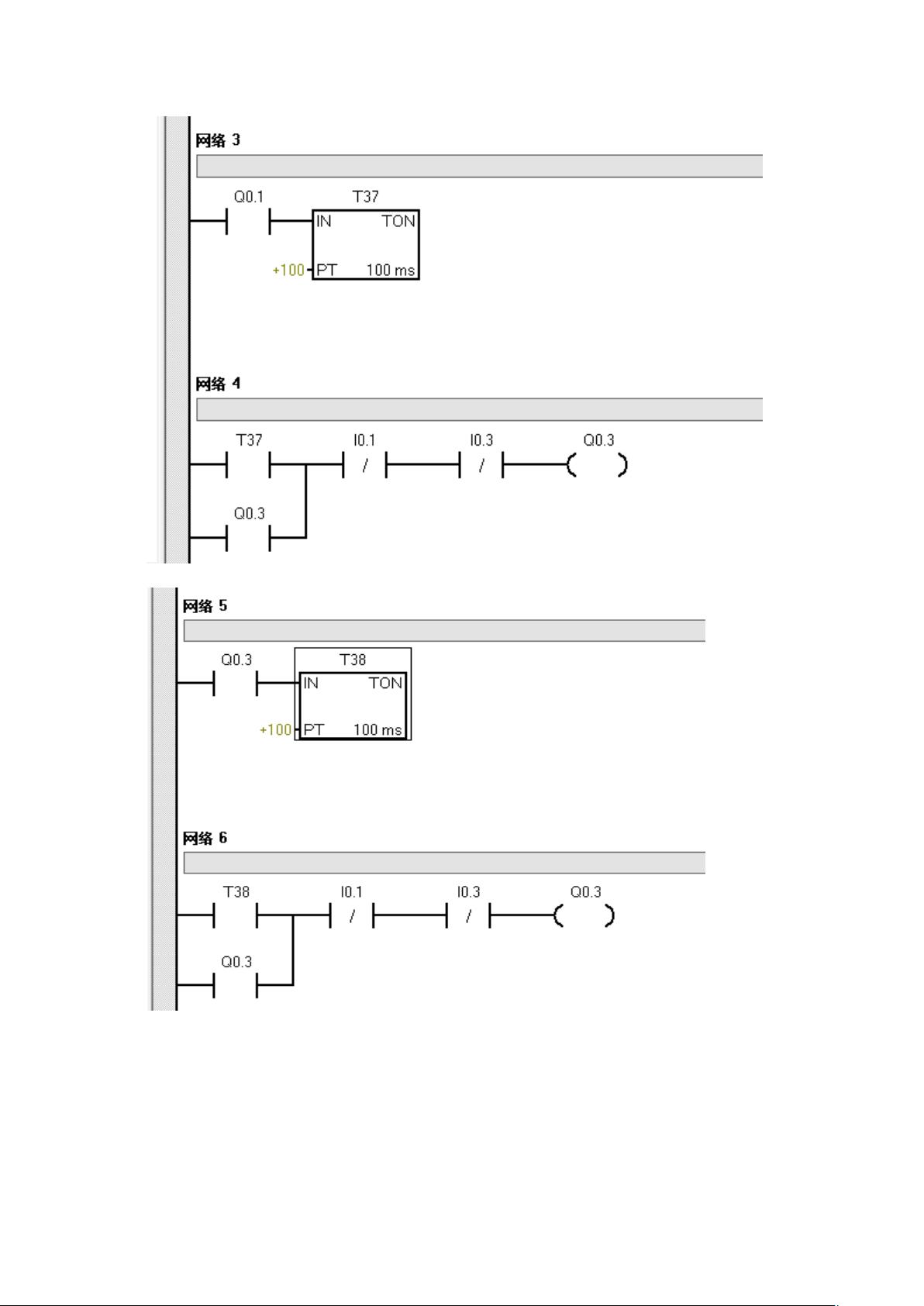
绕线转子电动机正逆转控制梯形图如下图所示。
图 4-1(1) 绕线转子电动机正逆转控制梯形图
剩余43页未读,继续阅读
246 浏览量
点击了解资源详情
点击了解资源详情
2021-09-29 上传
311 浏览量
495 浏览量
158 浏览量

yyyyyyhhh222
- 粉丝: 464
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- neo4j-community-4.x-unix.tar.gz and neo4j-community-4.x-windows.zip
- django-user-test
- functoria-lua:用很多函子来构建Lua解释器
- Umpyre
- 阿登脚印
- 高斯白噪声matlab代码-DIPCA-EIV:此回购包含了动态迭代PCA的实现,该PCA提议用于识别输入和输出测量值被高斯白噪声破坏的系统
- SpringBoot+Dubbo+MyBatis代码生成器
- fqerpcur.zip_MATLAB聚类GUI
- pg_partman:PostgreSQL分区管理扩展
- 下一店
- Umbles
- 图像处理:用于D2L图像处理的基于聚合物的Web组件
- queryoptions-mongo:Go软件包,可帮助构建基于queryoptions的MongoDB驱动程序查询和选项
- Redis-MQ:基于Redis的快速,简洁,轻量级的注解式mq,可以与任何IOC框架无缝衔接
- 答题卡检测程序/霍夫变换
- FANUC二次开发文档
