深度解析:目标检测的发展与挑战——从传统到深度学习
需积分: 0 35 浏览量
更新于2024-07-01
收藏 2.64MB PDF 举报
目标检测是一种计算机视觉任务,其目标是在图像或视频中识别并定位特定对象,同时提供其尺寸(bounding box)。这个过程涉及三个关键步骤:感兴趣区域的选择、特征提取以及检测和分类。
1. **感兴趣区域选择**:早期的传统目标检测算法首先确定可能包含物体的区域,这通常是通过人工设计的特征选择策略,如Viola-Jones算法中的Haar特征或Histogram of Oriented Gradients (HOG)。这种方法的局限性在于识别精度低,且计算量大,运行速度较慢。
2. **特征提取**:传统算法依赖于手工提取的特征,如DPM中的局部特征和部分模板,这些特征可能不完全适应所有场景,导致识别效果不佳。随着深度学习的兴起,这种方法逐渐被自动特征提取的卷积神经网络(CNN)所取代。
3. **检测与分类**:提取的特征随后通过分类器进行物体检测和分类。早期的传统算法可能出现多个正确结果的重复检测,而深度学习方法,如Faster R-CNN,通过引入区域提议网络(RPN)改进了这一环节,使得目标检测成为一个端到端的学习过程。
**Faster R-CNN**:
Faster R-CNN是两阶段目标检测方法的代表,它解决了传统单阶段方法(如YOLO和SSD)的效率与精度之间的平衡问题。Faster R-CNN包含以下几个关键组件:
- **Backbone**:负责从输入图像中提取高级特征。常用的Backbone包括VGG、ResNet、Inception等,它们通过多层卷积和池化操作形成深层次的特征表示。
- **Neck(Feature Pyramid Network,FPN)**:连接Backbone的不同层次特征,实现尺度不变性,使得算法能处理不同大小的目标。此外,FPN还扮演着将低层特征传递到高层并整合信息的角色。
- **Head(Region Proposal Network, RPN和Detection Head)**:RPN负责生成候选区域(RoIs),这些候选区域通过Detection Head进一步分类和调整边界框(RoI Pooling/Align),提高检测精度。
在面试中,Faster R-CNN可能会被问及其网络结构,包括RPN如何生成候选区域,以及它如何结合卷积特征和区域提议进行检测。这通常需要深入理解卷积神经网络的工作原理,尤其是对于特征图的操作和类别预测的过程。
目标检测技术经历了从传统手动特征提取到深度学习驱动的显著转变,Faster R-CNN作为其中的关键里程碑,不仅提高了检测精度,还优化了检测速度。后续的研究和改进继续围绕更高效、更精确的目标检测算法展开,如YOLO、Mask R-CNN和RetinaNet等。
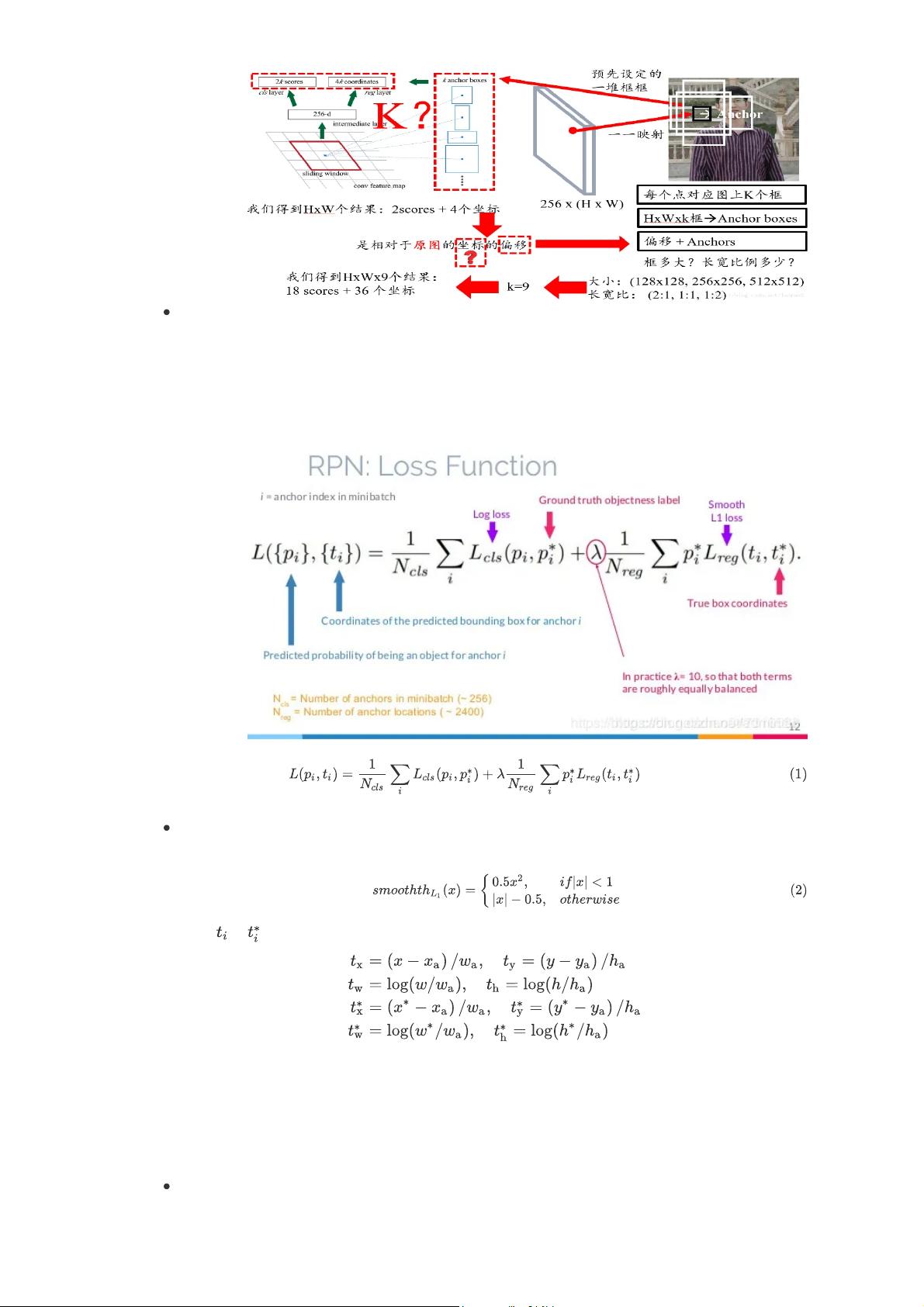
18个分数和36个坐标。
RPN的损失函数(多任务损失:二分类损失+SmoothL1损失)
训练RPN网络时,对于每个锚点(anchor)我们定义了一个二分类标签(是该物体或不是)。
以下两种情况我们视锚点为了一个正样本标签时:
1. 锚点和锚点们与标注之间的最高重叠矩形区域
2. 或者锚点和标注的重叠区域指标(IOU)>0.7
RPN损失中的回归损失部分输入变量是怎么计算的?(注意回归的不是坐标和宽高,而是由它
们计算得到的偏移量)
其中 和 分别为网络的预测值和回归的目标
在训练RPN时需要准备好目标t*。它是通过ground-truth box(目标真实box)和anchor
box(按一定规则生成的anchor box)计算得出的,代表的是ground-truth box与anchor
box之间的转化关系。用这个来训练rpn,那么rpn最终学会输出一个良好的转化关系t。而这
个t,是predicted box与anchor box之间的转化关系。通过这个t和anchor box,可以计算出
预测框box的真实坐标
RPN中的anchor box是怎么选取的?
剩余23页未读,继续阅读
2022-08-03 上传
2021-05-31 上传
312 浏览量
2773 浏览量
254 浏览量
461 浏览量
点击了解资源详情

白羊带你成长
- 粉丝: 30
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
