机电系统Simulink摩擦力仿真与有限状态机设计
需积分: 49 21 浏览量
更新于2024-09-08
1
收藏 119KB DOC 举报
本文档主要介绍了如何在MATLAB Simulink环境中创建一个用于模拟机电系统中摩擦力控制的有限状态机程序。该程序是针对一个包含重物M的力学模型,受到外力Fin、摩擦力Ff和弹簧拉力Fstr的作用。作者基于研究生课程的学习,提供了详细的步骤和理论基础。
首先,作者基于牛顿第二定律构建了力学模型,通过方程M*a = Fin - Ff - Fstr来描述系统的动力学,其中x代表位移,a是加速度,弹簧拉力Fstr与位移成正比,而摩擦力Ff则按照摩擦系数μ和正压力Fn(法向力)的关系进行计算。摩擦力分为静摩擦力(当物体静止时)和动摩擦力(当物体滑动时),其计算涉及静态摩擦系数μstatic和动态摩擦系数μsliding。
为了模拟摩擦状态的变化,文中引入了stateflow框图,根据物体的速度[pic]和正压力Fn来判断系统是静止(Fsum = Fin - Fsliding)还是处于运动状态(当[pic] > μFn时)。当物体静止且[pic]小于等于μFn时,静摩擦力Fstatic起作用;当物体速度为零时,摩擦力Fsum会保持物体加速度为零。stateflow框图中,输入信号包括合力Fsum(由Simulink提供)、零速度检测novelocity以及静摩擦力Fstatic,而标志状态stuck作为输出信号,用于指示摩擦状态。
接着,文档展示了如何建立摩擦力Ff的子系统模型,具体实现了一个与力学模型紧密结合的控制模块,这部分可能包括了数学函数块、状态转换逻辑和信号传递等Simulink组件。
整个文档不仅提供了理论分析,还展示了如何在Simulink环境中将这些理论转化为实际的仿真程序,这对于理解机电系统中的摩擦力控制和有限状态机在动态系统建模中的应用具有很高的参考价值。通过阅读和实践这段代码,读者可以掌握如何设计和实现类似的仿真模型,以优化和控制复杂的机电系统行为。
摩擦系统的 SUMULINK 仿真
班级:研 05—2 班 姓名:姜金刚 学号:050126015
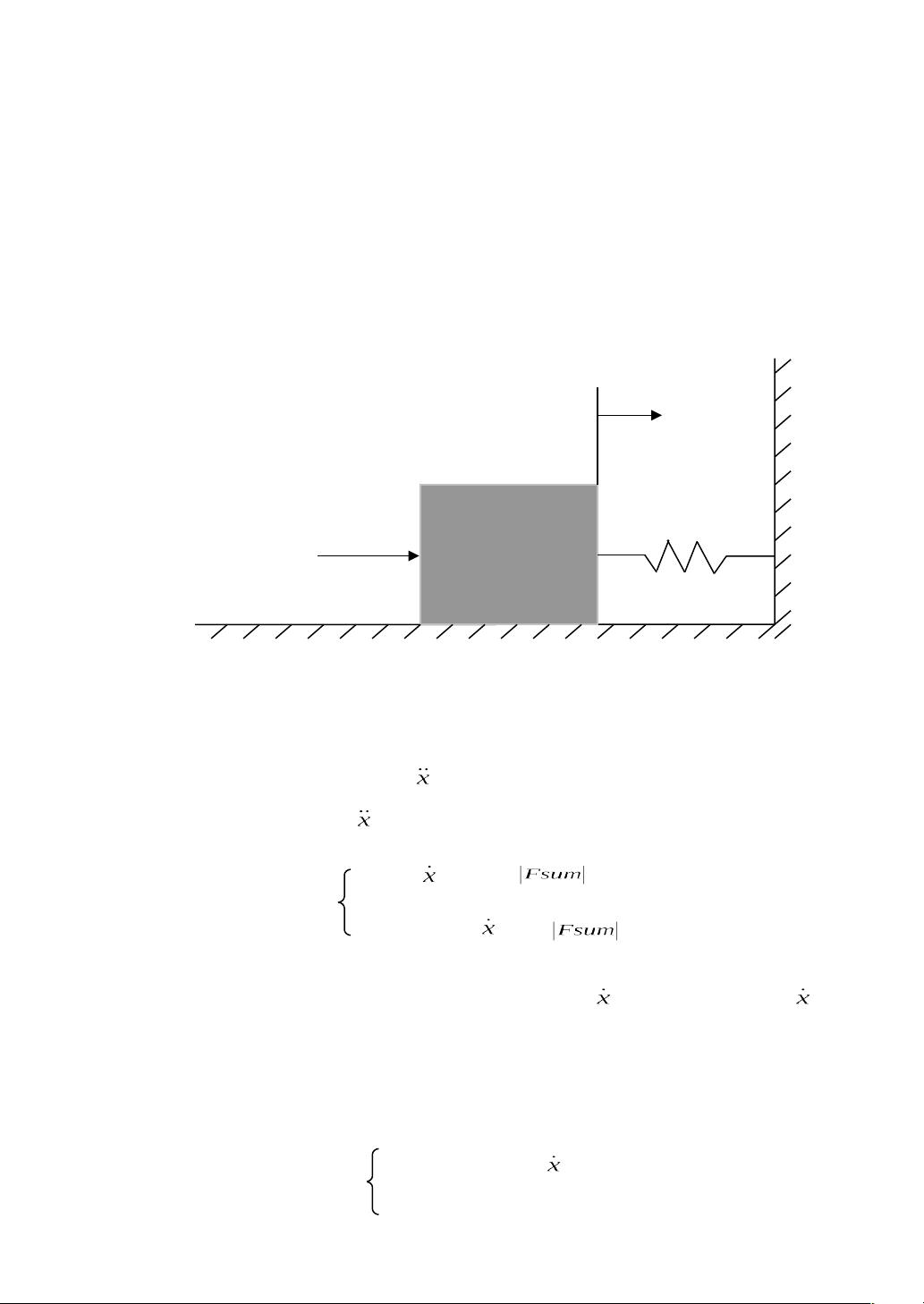
摩擦系统的力学模型如图 1 所示,在该模型中,重物 M 在外力 F
in
的作用
下运动。这样物体 M 所受的力包括外力 F
in
,摩擦力 F
f
和弹簧的拉力 F
str
。所
以可以的出合力为
F=F
in
-F
f
-F
str
图 1 力学模型的示意图
根据 Newton 第二运动定律,可以立即得出下面的方程
M =F= F
in
-F
f
-F
str
其中 x 为位移,所以 为加速度。弹簧的拉力 F
str
=Kx,K 为倔强系数,
摩擦力 F
f
可以由下面的公式计算出来
Sign( )μF
n
, >μF
n
F
sum
, =0 且 ≤μF
n
其中 μ 为摩擦系数,F
n
为正压力(法向力), 为物体的速度,当 =0
表示物体静止。F
sum
为静止状态下的受力,满足 F
sum
=F
in
-F
sliding
。当速度为非零
时,将需要一个冲力使之瞬间回零,该冲力往往超过最大的允许限度 F
sliding
。
当物体的速度已经为零时,则 F
sum
力将维持该物体的加速度为零。摩擦力一
般可以分为静摩擦力和动摩擦力,这主要取决于物体是否运动而言,亦即
μ
static
F
n
=F
static
, =0
M
K
x
F
in
μF
n
=
F
f
=
(1)
(2)
(3)
(4)
下载后可阅读完整内容,剩余6页未读,立即下载
2014-05-30 上传
2019-08-13 上传
2021-09-25 上传
2021-10-12 上传
2021-05-09 上传
2021-09-16 上传
2010-12-28 上传
2010-02-28 上传
109 浏览量

weixin_39840914
- 粉丝: 436
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- VFP命令和函数以及程序语句大全
- Jquery1.2.6源码分析.pdf
- jpg图像vc编程实现
- powerDesigner建模工具
- 如何进行软件需求分析
- 使用VB2005设计Smartphone智能手机应用程序入门
- WPF(Silverlight)+Getstarted.pdf
- Fedora下搭建FTP服务器
- 16x2字符型带背光液晶显示模块
- c语言程序设计课程(学生成绩管理系统)
- spring开发指南(夏昕)
- c#面试题及答案(二).txt
- jmail中文手册 帮助文档 pdf
- informix informix esql -c文档 c中嵌入sql esql/c总结 比较 笔记 详细
- C#语言进行编译的命名空间详解
- 华为面试题及答案.txt
