52单片机驱动的智能小车:自动循迹与无线操控
版权申诉
本文档主要探讨了基于52单片机开发的智能玩具小车控制系统的设计。智能小车作为机器人研究的入门领域,具有重要的研究价值和广阔的发展潜力,它不仅体现了机器人的基础功能,也为机器人技术的进步提供了实践平台。设计目标是实现自动循迹、避障和无线操控三个核心功能。
自动循迹功能依赖于TCRT5000传感器,这是一种光敏电阻阵列,通过检测环境光线的变化,帮助小车识别路径并跟踪预设轨迹。超声波传感器则用于障碍物检测,当小车接近障碍物时,传感器会发送信号给单片机,单片机会根据接收到的信息调整小车的行驶方向,确保安全行驶。
无线操控功能是通过nRF24L01+无线模块实现的,它允许用户远程控制小车的行驶模式和行为,增加了小车的操作灵活性。通过无线通信,可以在小车行驶过程中实时切换工作模式,使得小车可以根据不同场景进行适应性操作。
该设计的智能小车不仅实现了预期的功能,而且具有良好的鲁棒性和可靠性。即使在遇到突发状况时,如无线信号干扰或传感器故障,小车也能保持基本的控制和操作,或者通过备用机制避免进一步损坏。这种设计充分考虑了系统的稳定性和实用性。
这份文档详细介绍了如何利用单片机技术构建一个功能强大的智能玩具小车,涉及硬件选型(如52单片机、TCRT5000传感器、超声波传感器和nRF24L01+无线模块)、信号处理流程以及关键功能的实现策略。通过这样的设计,不仅能够提升小车的智能化程度,还为后续的机器人研发积累了宝贵的经验和技术基础。
7
使用直流电机驱动时,需要利用减速齿轮按一定的减速比减速后,才可以作为小车
的驱动电机。否则,会因小车的速度过快,导致单片机来不及处理接收到的信号,失去
对小车的控制。另外小车的运动方向,需要利用电机的不同转速和转向来实现。因此须
利用 L298N 驱动模块来实现对电机的控制。
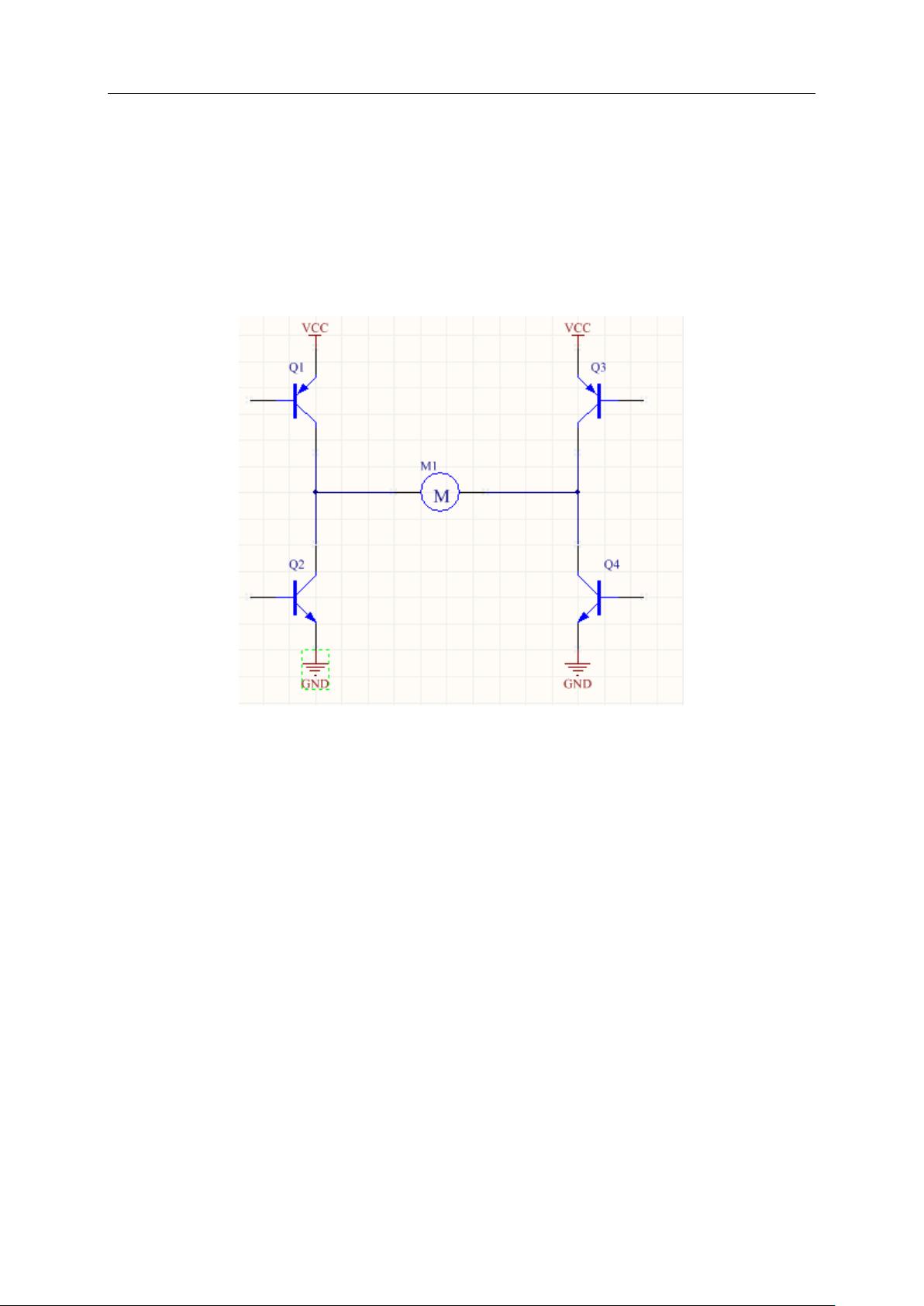
L298N 驱动模块是依靠 L298N 芯片来实现对电机的控制。L298N 芯片内部核心是
一个双 H 桥,如下图所示:
图 6 H 桥电路原理图
当 Q
1
和 Q
4
导通时,电机顺时针转动;当 Q
2
和 Q
3
导通时,电机逆时针转动。在 L298N
中,有两个如此的 H 桥,分别控制两个电机。其中每一个 H 桥的 Q
1
和 Q
4
的基极相连
接,Q
2
和 Q
3
的基极相连。发射极正极与驱动电压相连,负极与 GND 相连。L298N 中
除须连接一个驱动电压外,还须连接一个逻辑电压。单片机就是负责控制各基极的电平,
来实现对电机转动的控制。
L298N 还有两个使能端,分别控制 H 桥的开启。利用 L298N 控制电机转速,就是
利用 PWM 时序脉冲控制使能端开启的时间,达到控制电机导通的时间,进而实现了控
制电机的转速。L298N 在使用时会产生大量的热量,因此还需要使用散热片进行散热。
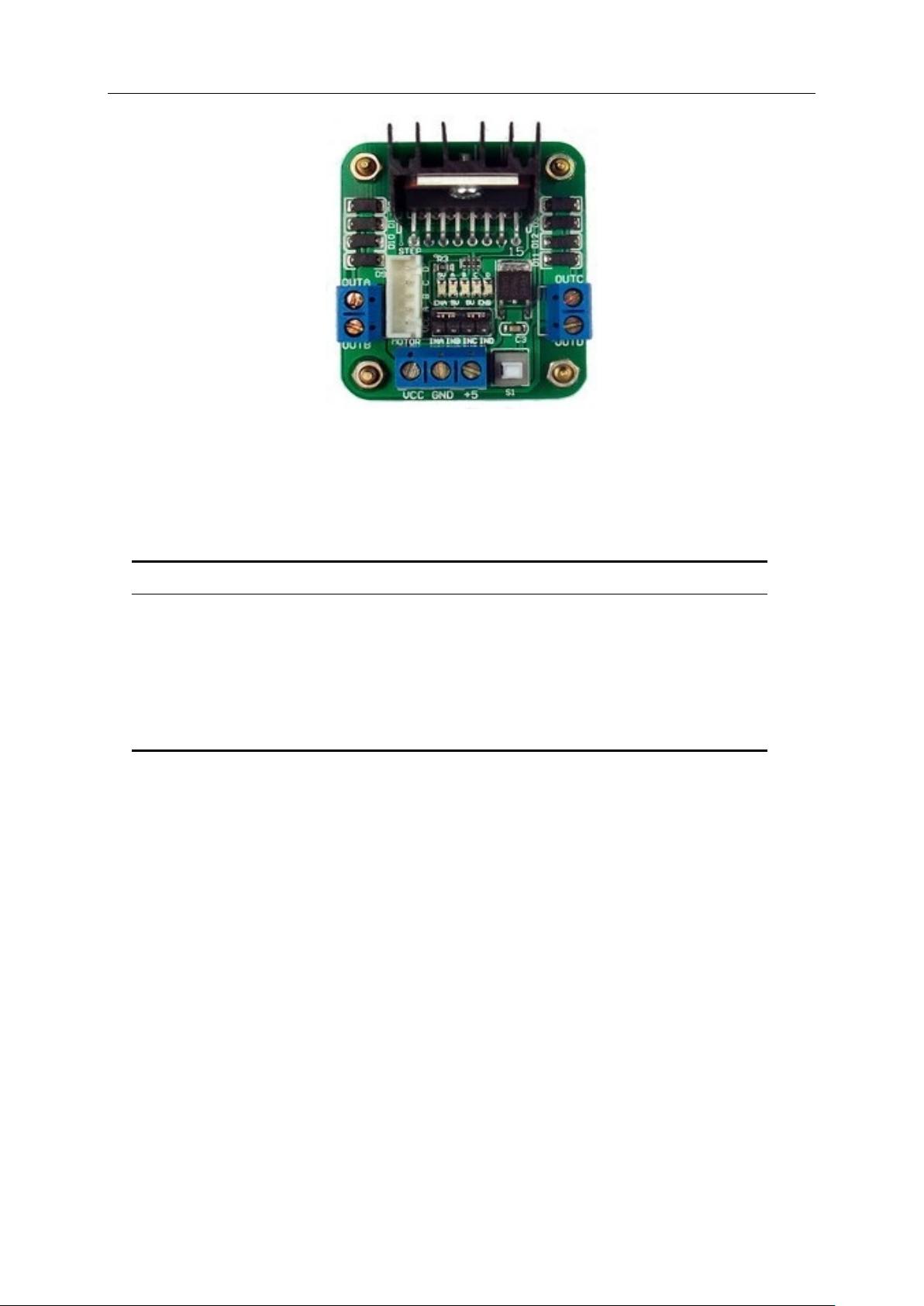
将电机连接在驱动模块上后,便可以按照前述进行对电机的控制。实际测试表明该
模块能及时地进行 H 桥导通方向的切换,对两个使能端的 PWM 脉冲控制能明显地控制
电机转速。下图为所购买的 L298N 驱动模块:
剩余48页未读,继续阅读
2022-07-03 上传
2022-07-03 上传
2022-07-03 上传
2012-02-15 上传
2022-07-01 上传
2023-04-09 上传
2023-04-16 上传
2022-06-30 上传

悠闲饭团
- 粉丝: 200
- 资源: 3406
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
