MATLAB直流电机双闭环调速系统仿真分析
版权申诉
9 浏览量
更新于2024-06-19
收藏 2.69MB PDF 举报
"运动控制MATLAB仿真实现直流双闭环调速系统,涉及电机模块、负载转矩、转速给定、PI控制器、电流采样、电流滞环调节、晶闸管斩波器以及续流二极管等功能模块。"
在电气工程和自动化领域,MATLAB是一种强大的工具,尤其在运动控制系统的仿真方面。本资料“运动控制MATLAB仿真”重点介绍了直流双闭环调速系统,这种系统结合了速度和电流两个闭环,以实现精确的电机控制。
首先,电机模块(DiscreteDC_Machine)是整个系统的基础,它模拟了直流电机的工作特性。接着,负载转矩给定(LoadTorque)模块允许外部设定电机运行时所受的负载条件,以模拟实际应用中的各种工况。
转速给定(SpeedReference)模块用于设定电机期望的转速,而转速PI调节器(SpeedController)则负责对比给定转速和实际转速的差值,通过比例积分运算来调整电流给定,确保电机能够接近或达到目标转速。比例和积分系数的调整直接影响着控制的响应速度和稳定性。
电流采样环节(1/z)模拟了实际系统中电流检测的过程,并在一个采样周期内保持电流值。电流滞环调节(CurrentController)则是为了确保电流稳定在设定范围内,通过比较采样值与给定值,利用滞环控制策略来调整输出,从而控制晶闸管斩波器的触发角。
晶闸管斩波器(GTO)控制模块根据输入电压改变触发角,调节电机端电压,进而影响电机的转速和扭矩。续流二极管D1在晶闸管关断时为电机提供续流路径,防止电流突变导致的电压冲击。
电压传感器Vd用于测量电机端电压,而示波器(scope)则用于实时显示电压、电流和转速的波形,帮助分析系统的动态性能和稳定性。
整个系统的功能概括起来就是:通过MATLAB仿真,模拟一个直流电机在不同负载条件下的双闭环调速过程,包括速度控制和电流控制两部分,同时提供了可视化界面来观察和分析系统的运行状态。这种仿真方法对于理解和优化运动控制系统的设计至关重要,对于学习和研究自动化技术的学生和工程师来说具有很高的实用价值。
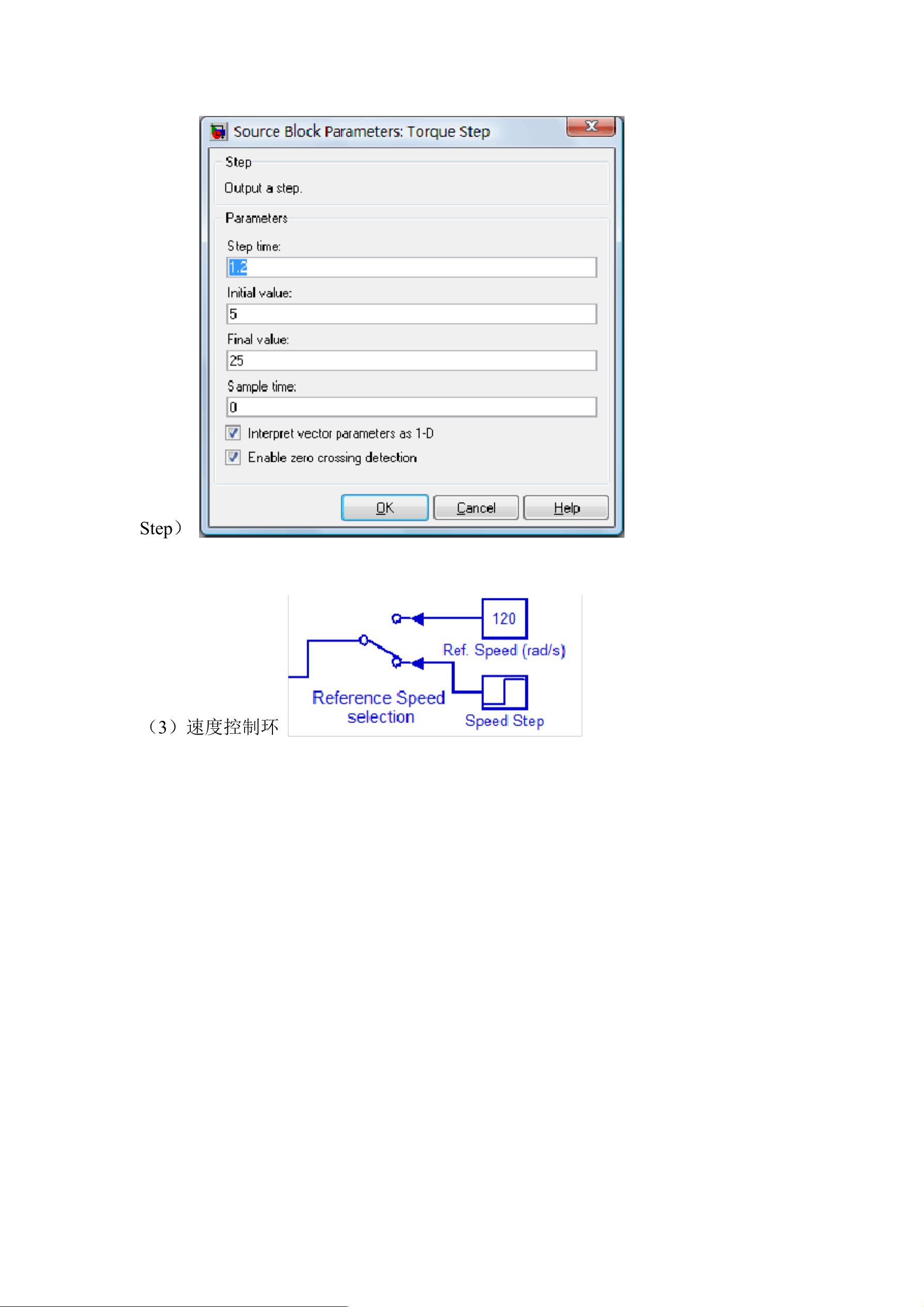
Step)
(3)速度控制环
速度控制主要是通过速度控制器实现的。速度控制器的输出为 Iref,是下一
级的电流控制器的参考输入。wm 和 wref 是速度控制器的两个输入,其中 wm 表
示电机转速;wref 是参考转速输入,通过一个选择开关将两个速度参考输入接入:
Ref .Speed 和 Speed Step。
双击 Speed Step,得到其详细情况:
剩余27页未读,继续阅读
177 浏览量
2021-10-31 上传
402 浏览量
2021-10-31 上传
170 浏览量
110 浏览量

hhappy0123456789
- 粉丝: 76
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITween插件实用教程:路径运动与应用案例
- React三纤维动态渐变背景应用程序开发指南
- 使用Office组件实现WinForm下Word文档合并功能
- RS232串口驱动:Z-TEK转接头兼容性验证
- 昆仑通态MCGS西门子CP443-1以太网驱动详解
- 同步流密码实验研究报告与实现分析
- Android高级应用开发教程与实践案例解析
- 深入解读ISO-26262汽车电子功能安全国标版
- Udemy Rails课程实践:开发财务跟踪器应用
- BIG-IP LTM配置详解及虚拟服务器管理手册
- BB FlashBack Pro 2.7.6软件深度体验分享
- Java版Google Map Api调用样例程序演示
- 探索设计工具与材料弹性特性:模量与泊松比
- JAGS-PHP:一款PHP实现的Gemini协议服务器
- 自定义线性布局WidgetDemo简易教程
- 奥迪A5双门轿跑SolidWorks模型下载
