360车载环视算法详解:从成像模型到拼接技术
"车载360环视技术是利用多摄像头采集车辆周围环境信息,通过图像处理技术生成车辆的360度全景视图,帮助驾驶员更好地了解周围环境。该技术涉及摄像机成像模型、图像拼接算法、查找表映射等核心环节。"
在车载360环视系统中,摄像机成像模型是算法设计的基础。相机成像模型分为线性模型(如针孔相机模型)和非线性模型(如鱼眼相机模型),其中鱼眼相机模型适用于360环视,因为其能够捕捉更广阔的视野。摄像机成像模型描述了从世界坐标系到图像坐标系的转换过程,这通常涉及到多个坐标系之间的变换:世界坐标系、相机坐标系、成像平面坐标系和图像坐标系。
在360车载环视算法设计中,首先需要理解系统的功能,包括提供车辆俯视图和3D环视效果。算法功能主要包括2D俯视图查找表映射和3D环视图查找表映射。2D俯视图是将多个摄像头的图像进行拼接,形成一个鸟瞰视角,帮助驾驶员直观地看到车辆周围的障碍物。而3D环视图则通过更复杂的处理,提供环绕车辆的三维视角,增强空间感。
3D环视图的生成涉及到图像拼接算法框架,通常包括图像预处理、特征匹配、几何校正和无缝拼接等步骤。在这个过程中,虚拟摄像机的概念被用来模拟理想的观测角度,以消除真实摄像头的物理限制,如鱼眼镜头的畸变。优化参数的调整对于提高图像质量和拼接效果至关重要,包括失真矫正参数、图像匹配阈值等。
生成2D和3D查找表是算法中的关键步骤。查找表映射是为了高效地执行图像间的坐标转换,将不同摄像头捕获的图像坐标映射到统一的视图坐标系中。这涉及到对摄像机的内参和外参的精确估计,以及对图像畸变的补偿。
车载360环视系统的设计和实现是一个复杂的过程,涵盖了计算机视觉、图像处理和几何变换等多个领域的知识。通过详细记录每一步骤的原理和方法,可以帮助读者理解并独立完成类似算法的开发和仿真。本文提供的信息旨在提供全面的指导,使得读者仅参考本文就能掌握360车载环视的算法原理和技术流程。
4 / 26
mm/pixel(单位像素表示多少毫米)。
2.2.1
映射过程
如图 1 和图 2 所示,世界坐标系中的点 M 首先映射到相机坐标系中的点 P,虽然
点 P 和点 M 表示是的同一个位置,但是由于它们的基(坐标系)不一样,所以点 P 和
点 M 的坐标也不一样。
(一) 世界坐标系 相机坐标系
世界坐标系 M 点与相机坐标系的 P 点之间的转换可以通过一个 3*3 旋转矩阵 R 和
一个 3*1 平移向量 T 来表示,具体如下:
其齐次坐标表示为:
在以后的表达中,使用
,其中 H 是 4*4 的旋转平移矩阵,在接下来的
文档描述中,H 代表的是摄像机的外参矩阵。
(二) 相机坐标系 成像平面
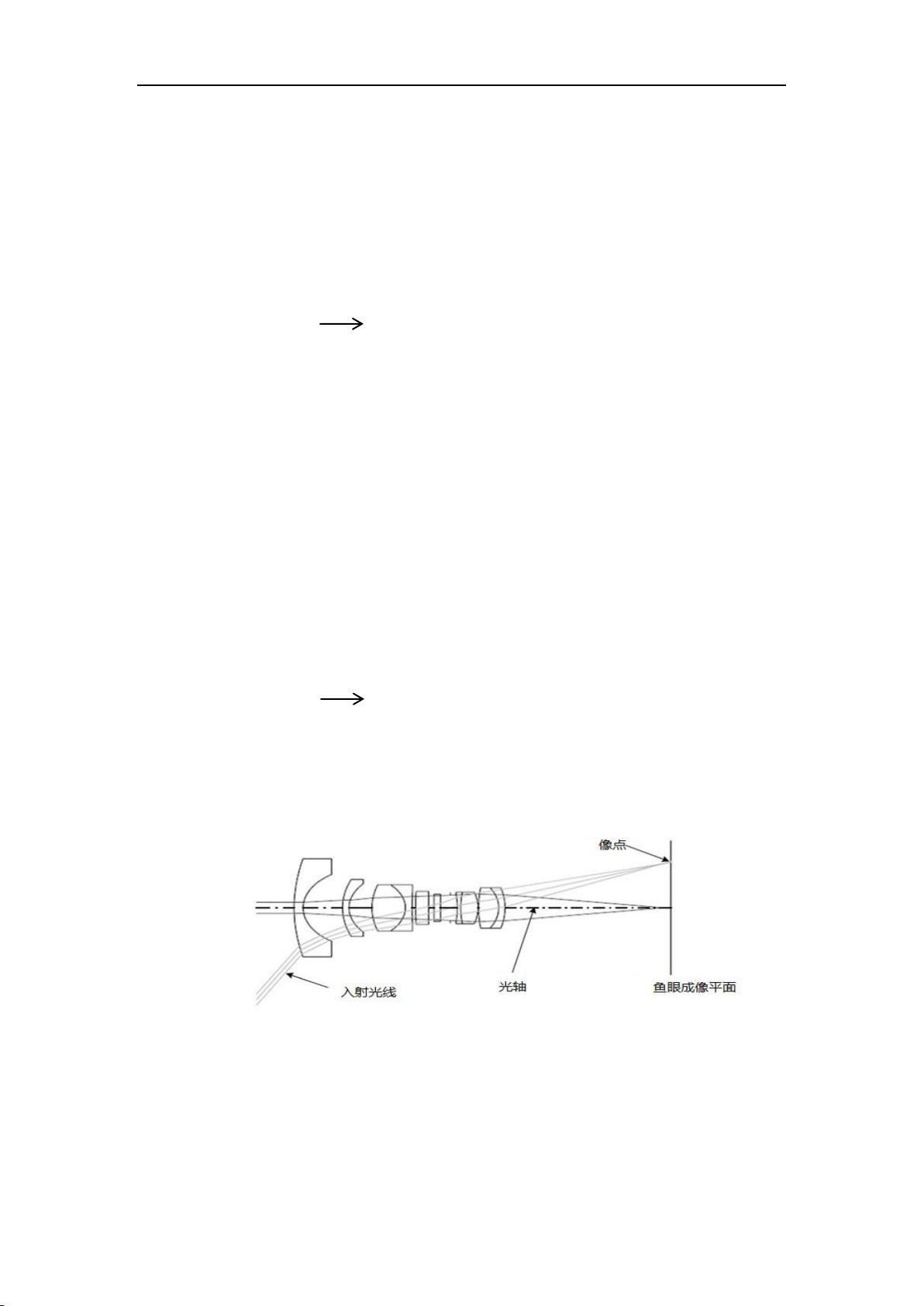
鱼眼镜头一般是由十几个不同的透镜组合而成的,在成像过程中,入射光线经过不
同程度的折射,可以将大的视场角的光线投影到尺寸有限的成像平面上,使得鱼眼镜头
与普通镜头相比起来拥有了更大的视野范围。鱼眼镜头物理成像过程如图 3 所示:
图3 鱼眼镜头物理成像过程
在鱼眼摄像机成像模型中,如果按照图 3 这种多元件的构造结构对鱼眼相机的折射
关系的分析,会使得入射光线通过各种折射和畸变在鱼眼成像平面上成像的成像过程变
得相当的复杂,对于算法设计人员来说,这几乎是个不可能完成的任务。
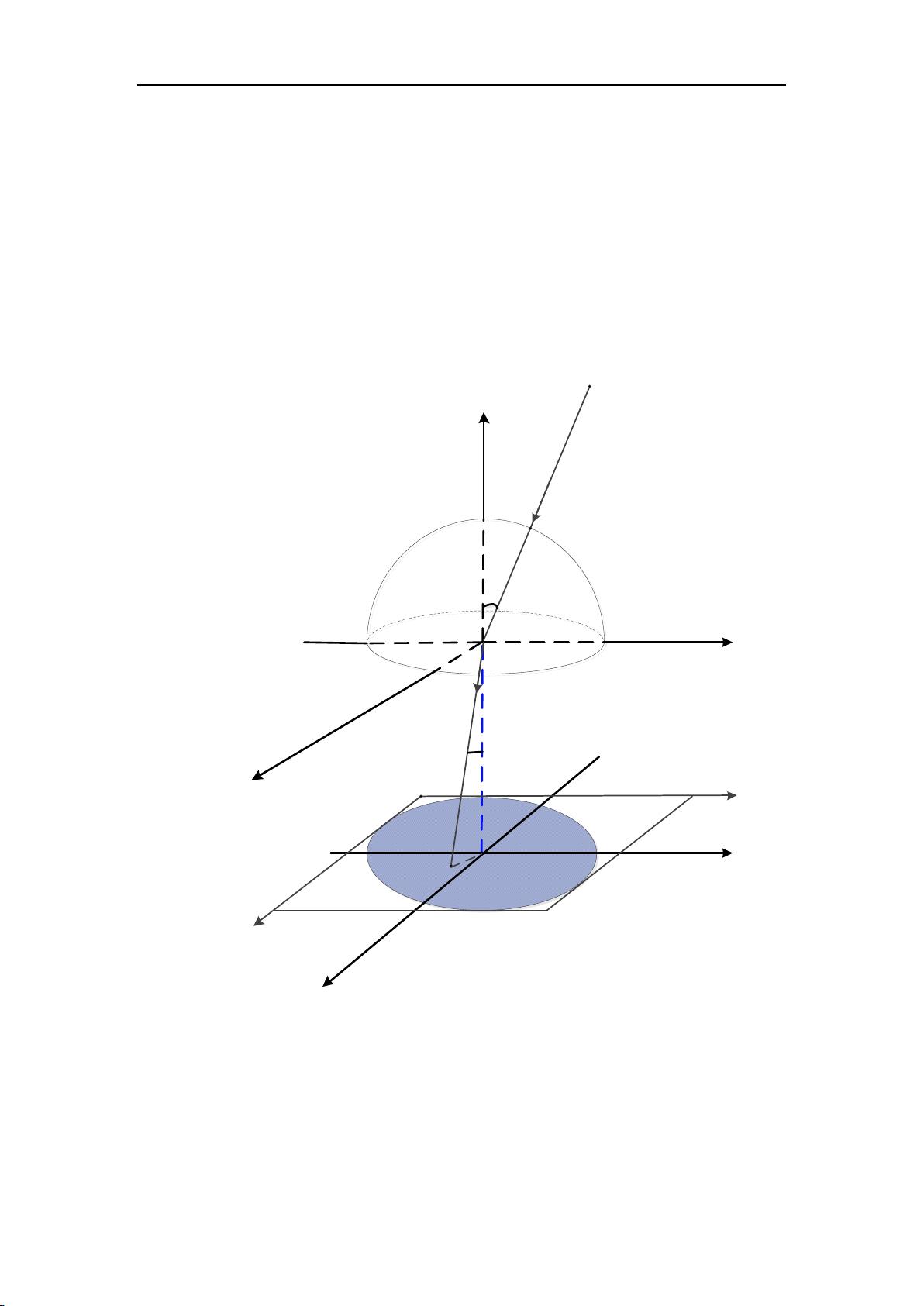
研究表明,鱼眼相机成像时遵循的模型可以近似为单位球面投影模型。所以,图 3
剩余25页未读,继续阅读
点击了解资源详情
2024-10-26 上传
2021-09-25 上传
点击了解资源详情
点击了解资源详情

zhou578325336
- 粉丝: 7
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
