LMS自适应滤波器在时延估计中的应用分析
"利用LMS自适应滤波器进行时延估计——动态行为分析"
本文主要探讨了利用LMS(Least Mean Squares)自适应滤波器在时延估计中的应用,特别是在声纳系统中的静态和动态行为。LMS算法是一种广泛使用的在线优化方法,用于找到使两个信号之间均方误差最小化的滤波器权重。在声纳系统中,这种时延可以转换为目标辐射信号的方向,从而对目标进行定位。
对于静态宽带目标,LMS自适应跟踪器的性能进行了分析。研究表明,对于连续适应的跟踪器,其性能接近Cramér-Rao下界,即理论上的最佳估计精度。此外,还为离散适应跟踪器建立了性能预测模型,该模型与仿真结果高度一致,证明了自适应跟踪器在输入频谱变化时具有较低的敏感性,优于使用固定输入滤波器的传统跟踪器。
文章的介绍部分指出,LMS自适应滤波器是一个有限脉冲响应(FIR)滤波器结构,它通过调整权重来最小化两个输入之间的均方差。这意味着滤波器的平均响应会收敛到离散Wiener解,这是一种在统计意义上最优的滤波器响应。
接下来,文章详细讨论了LMS算法在时延估计中的动态行为。在时变环境中,LMS滤波器能够根据输入信号的变化实时更新权重,从而保持对时延的准确估计。由于LMS算法具有低计算复杂度和良好的收敛特性,它特别适合于实时系统中的应用。
在分析部分,作者可能探讨了LMS滤波器的收敛速度、稳态误差以及在不同信噪比条件下的性能。此外,可能还研究了滤波器长度、学习率和步长参数对时延估计精度的影响,这些参数是控制LMS算法性能的关键因素。
文章的结论可能强调了LMS自适应滤波器在时延估计中的优势,包括其适应性和鲁棒性,并可能提出了一些未来的研究方向,如改进算法以提高估计精度,或者将LMS方法扩展到多通道或分布式传感器系统中。
这篇论文为LMS自适应滤波器在时延估计领域的应用提供了深入的理解和理论支持,对于声纳系统和其他需要精确时延估计的领域具有重要的实践意义。
REED
et
al.:
LMS
ADAPTIVE FILTER-STATIC BEHAVIOR
563
-
+
M-POINT
-
c
din)
-
FFT
t
-
:
0
M-POINT
IFFT
COMPLEX
1-TAP
LMS
AF
II
w
LMS AF
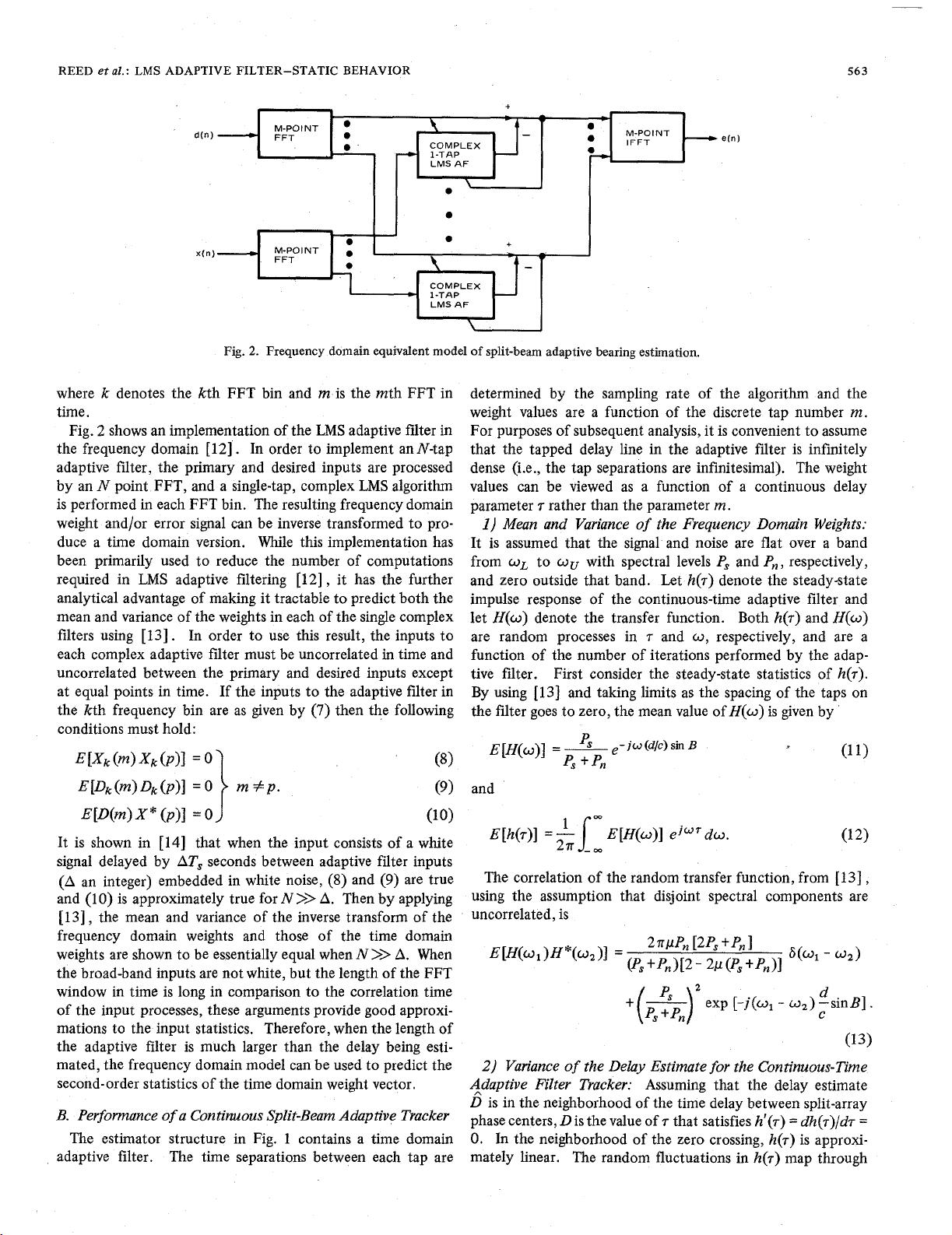
Fig.
2.
Frequency domain equivalent model
of
split-beam adaptive bearing estimation.
where
k
denotes the kth FFT bin and
m
is the mth FFT in
time.
Fig.
2
shows an implementation of the
LMS
adaptive filter
in
the frequency domain
[
121
.
In order to implement an N-tap
adaptive filter, the primary and desired inputs are processed
by an
N
point FFT, and a single-tap, complex
LMS
algorithm
is performed in each FFT bin. The resulting frequency domain
weight and/or error signal can be inverse transformed to pro-
duce a time domain version. While this implementation has
been primarily used to reduce the number of computations
required in
LMS
adaptive filtering
[12]
,
it has the further
analytical advantage of making
it
tractable to predict both the
mean and variance of the weights in each of the single complex
filters using
[
131
.
In order to use this result, the inputs to
each complex adaptive filter must be uncorrelated in time and
uncorrelated between the primary and desired inputs except
at equal points in time. If the inputs to the adaptive filter in
the kth frequency bin are as given by
(7)
then the following
conditions must hold:
E
[xk
(m>
xk
(PI]
=
EIDk(m)Dk(P)l
=o
m
fp.
(9)
i
(8)
E[Nm)X*
(P)l
=
0
(10)
It is shown in
[
141
that when the input consists of a white
signal delayed by
AT,
seconds between adaptive filter inputs
(A
an integer) embedded in white noise,
(8)
and
(9)
are true
and
(10)
is approximately true for
N
>>
A.
Then by applying
[
131
,
the mean and variance
of
the inverse transform of the
frequency domain weights and those of the time domain
weights are shown to be essentially equal when
N
>>
A.
When
the broad-band inputs are not white, but the length of the FFT
window in time is long in comparison to the correlation time
of the input processes, these arguments provide good approxi-
mations to the input statistics. Therefore, when the length of
the adaptive filter is much larger than the delay being esti-
mated, the frequency domain model can be used to predict the
second-order statistics of the time domain weight vector.
B. Performance
of
a
Continuous Split-Beam Adaptive Tracker
The estimator structure in Fig.
1
contains a time domain
adaptive filter. The time separations between each tap are
determined by the sampling rate of the algorithm and the
weight values are a function of the discrete tap number
m.
For purposes of subsequent analysis, it is convenient to assume
that the tapped delay line in the adaptive filter is infinitely
dense (i.e., the tap separations are infinitesimal). The weight
values can be viewed as a function of a continuous delay
parameter
7
rather than the parameter
m.
1)
Mean and Variance of the Frequency Domain Weights:
It is assumed that the signal and noise are flat over
a
band
from
oL
to
ou
with spectral levels
P,
and
P,,
respectively,
and zero outside that band. Let
h(7)
denote the steady-state
impulse response of the continuous-time adaptive filter and
let
H(o)
denote the transfer function. Both
h(7)
and
H(o)
are random processes in
7
and
o,
respectively, and are a
function
of
the number of iterations performed by the adap-
tive filter. First consider the steady-state statistics of
h(7).
By using
[13]
and taking limits as the spacing of the taps
on
the filter goes to zero, the mean value
of
H(o)
is given by
and
loo
E[h(7)]
=
E[H(o)] eiwrdo.
(12)
The correlation of the random transfer function, from
[13]
,
using the assumption that disjoint spectral components are
uncorrelated, is
(13)
2)
Variance of the Delay Estimate for the Continuous-Time
4daptive Filter Tracker:
Assuming that the delay estimate
D
is in the neighborhood of the time delay between split-array
phase centers,
D
is the value of
7
that satisfies
h'(7)
=
dh(.r)/d.r
=
0.
In the neighborhood
of
the zero crossing,
h(7)
is approxi-
mately linear. The random fluctuations in
h(7)
map through
剩余10页未读,继续阅读
392 浏览量
798 浏览量
364 浏览量
2021-02-09 上传
177 浏览量
2021-02-09 上传
2021-04-02 上传
2021-04-18 上传
373 浏览量

Chen-Sh
- 粉丝: 91
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
