卡尔曼滤波器详解及应用
下载需积分: 8 | PDF格式 | 97KB |
更新于2025-01-09
| 183 浏览量 | 举报
"该资源是关于现代数字信号处理的PPT,特别关注卡尔曼滤波这一主题。由武汉大学研究生课程提供,由孙洪教授讲解。内容涵盖了从Wiener预测器到Kalman滤波器的基本理论和应用。"
在数字信号处理领域,卡尔曼滤波是一种用于在线估计动态系统状态的最优线性递归算法。它基于概率统计理论,能够通过融合来自不同传感器或数据源的信息,提供最优化的估计,即使在存在噪声和不确定性的情况下也能表现优异。
5.1章节介绍了卡尔曼滤波的基础概念。Wiener预测器是卡尔曼滤波的前身,它试图最小化均方误差(Mean Squared Error, MSE),以实现对未来的最佳预测。卡尔曼滤波则在此基础上进一步发展,考虑了系统的线性和高斯噪声,使得滤波器能动态地更新其内部状态,从而更精确地追踪信号的变化。
卡尔曼滤波器的工作原理包括两个主要步骤:预测(Prediction)和更新(Update)。预测阶段,滤波器基于上一时刻的状态和系统动态模型来预估当前状态;更新阶段,滤波器利用观测数据来校正预测结果,使得估计更加接近实际状态。这一过程反复进行,不断优化估计精度。
滤波器的关键参数包括状态转移矩阵、观测矩阵、过程噪声协方差矩阵和观测噪声协方差矩阵。这些参数定义了系统的行为以及噪声的特性,影响滤波器的性能。
在数学表达式中,可以看到 Kalman滤波器的基本方程,如状态更新方程和观测更新方程,以及它们与噪声的关系。例如,状态向量 \( x \) 的预测值和更新值,以及误差协方差矩阵 \( P \) 的演变,这些都是卡尔曼滤波的核心部分。
Wiener预测器和卡尔曼滤波器之间的关系也得以阐述。Wiener预测器假设输入信号是白噪声,而卡尔曼滤波器通过使用“白化滤波器”(Whitening filter)和“最优因果滤波器”(Optimum causal filter for white input)的概念,实现了对白噪声输入的最优处理。
这份PPT详细讲解了卡尔曼滤波的理论基础和数学模型,是学习和理解这一重要信号处理技术的理想资料。对于深入研究控制系统、导航、图像处理、通信等领域的人来说,掌握卡尔曼滤波至关重要。
现代数字信号处理
1
武汉大学研究生课程 © 2002 孙洪 1
现代数字信号处理
Advanced Digital Signal
Advanced Digital Signal
Processing
Processing
Chap 5 Order
Chap 5 Order
-
-
Recursive Algorithm
Recursive Algorithm
----
----
Kalman
Kalman
Filter
Filter
武汉大学研究生课程 © 2002 孙洪 2
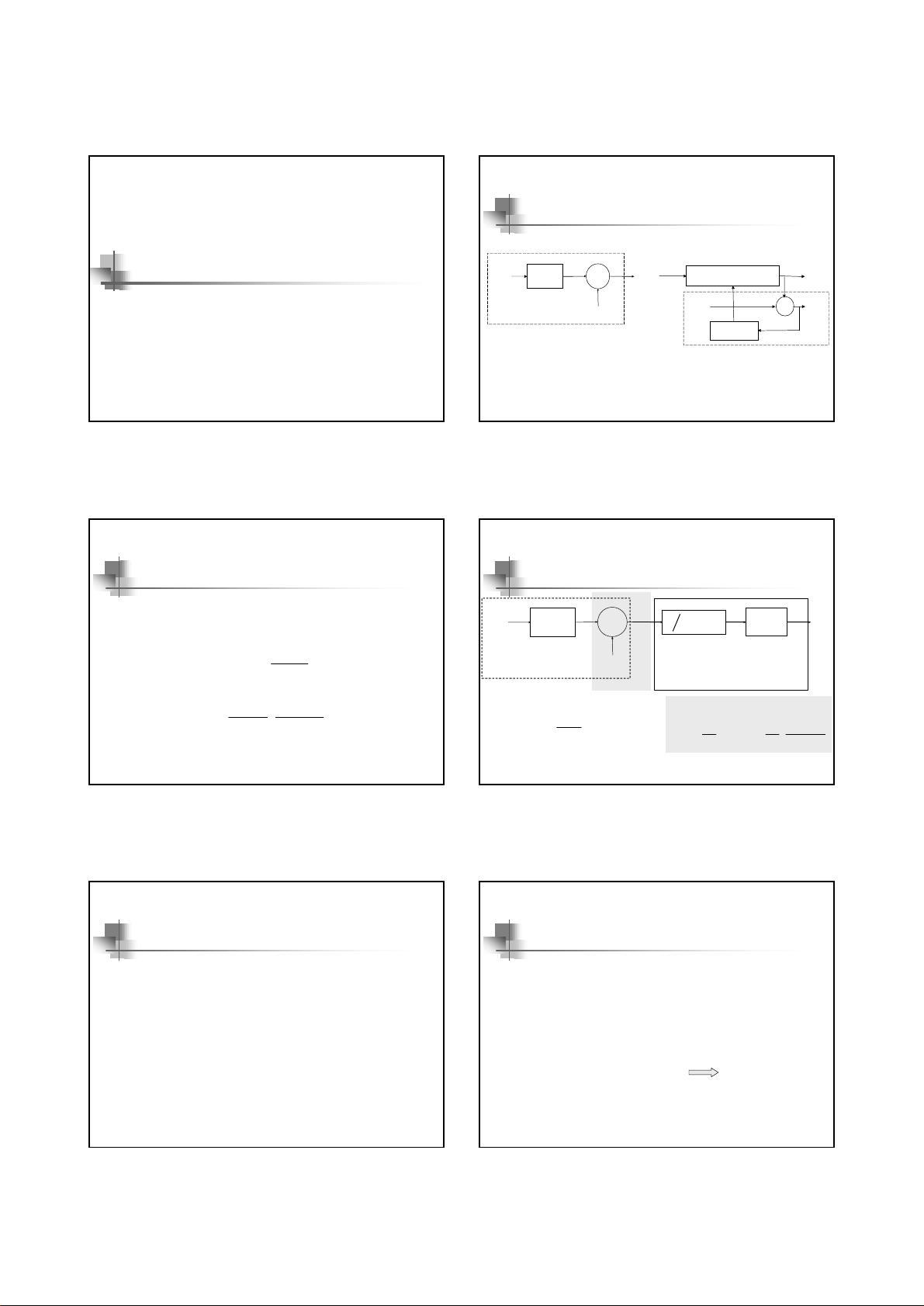
5.1 Introduction
n Wiener Predictor
KalmanFilters
(
)
zH
(
)
nw
(
)
nv
+
(
)
nx
erLinearFilt
−
(
)
ns
(
)
ny
(
)
nd
(
)
ne
MMSE
(
)
(
)
∑
−
=
−=+
1
0
ˆ
p
k
k
knxwNns
∑
−
=
−−+=+−=
1
0
)()()(
ˆ
)()(
p
k
k
knxwNnsNnsndne
武汉大学研究生课程 © 2002 孙洪 3
Wiener Predictor
KalmanFilters
[
]
∑
∑
∑
−
=
−
=
−
=
−+−−=
1
0
1
0
1
0
2
)()(2)0()(
p
k
p
k
p
k
xxjkxskss
jkrwwkNrwrneE
)(
)(
)(
zR
zR
zzH
xx
xs
N
nc
=
()
+
=
)/1(
)(1
)(
**2
zB
zRz
zB
zH
xs
N
s
c
σ
武汉大学研究生课程 © 2002 孙洪 4
Wiener Pure Predictor
KalmanFilters
()
[
]
+
= )(
1
)( zBz
zB
zH
N
c
(
)
zH
(
)
nw
(
)
nv
+
(
)
zB1
(
)
zG
(
)
ns
ˆ
(
)
nε
(
)
nx
(
)
ns
Whitening
filter
Optimum causal
filter for white
input
[]
==
+
)/1(
)(1
)(
1
)(
**22
zB
zR
zRzG
xs
s
s
s
σσ
ε
)/1()()(
**2
zBzBzR
sxx
σ=
武汉大学研究生课程 © 2002 孙洪 5
Kalman Filter Algorithm
n R.E. Kalman(1960)
n Approach to formulating the MMSE linear
filtering problem (causal IIR Wiener filter)
n Formulation and solution are dynamic (or
state-space) modeling
n The time-recursive processing of the input
data
KalmanFilters
武汉大学研究生课程 © 2002 孙洪 6
5.2 Order-recursive Algorithm
Normal Equation
()()
mkmRwmR
p
k
xxkxs
∀−=
∑
−
=
,
1
0
KalmanFilters
xsxxp
rRW
1−
=
XWs
T
pp
=
ˆ
11
ˆ
,
++ p
T
p
sW
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐

yang_ttc
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
