图像拼接与PDF整合技术教程
需积分: 9 187 浏览量
更新于2024-07-22
收藏 2.04MB PDF 举报
"图像拼接处理的教程,涵盖了图像对齐和拼接的算法,适合视频稳定、总结和全景图像创建等应用。"
在图像处理领域,图像拼接是一种技术,它将多张图片合并成一张大图,通常用于创建全景照片或在有限视角下展示更广阔的场景。这个过程主要涉及两个关键技术:图像对齐(Image Alignment)和图像拼接(Image Stitching)。
图像对齐是图像拼接的基础,其目标是确定不同图像之间的对应关系,即使得重叠区域的像素能够正确匹配。这通常涉及到不同程度的重叠图像,如在视频稳定、视频摘要中,以及创建全景图像时。对齐算法可以基于像素级(pixel-based)或者特征级(feature-based)的方法。像素级方法直接比较图像的像素值,而特征级方法则识别图像中的显著点或结构,如边缘、角点,然后对这些特征进行匹配。
特征级对齐算法通常更为鲁棒,因为它不那么依赖于精确的像素匹配。例如,SIFT(尺度不变特征变换)和SURF(加速稳健特征)就是常用的特征检测和描述算子,它们能够在光照变化、尺度变化等条件下保持稳定。
图像拼接则是将对齐后的图像进行无缝融合,这需要解决由于视差、场景移动导致的模糊(blurring)和鬼影(ghosting)问题,以及因曝光差异引起的色彩不一致。融合算法通常会使用图像过渡技术,比如使用权重函数来平滑过渡区,减少视觉上的割裂感。此外,为了处理曝光差异,可能还需要进行色调映射(tonemapping)或亮度调整。
该教程还讨论了基本的运动模型,这是理解对齐和拼接算法的关键。这些模型包括平移、旋转、缩放等基本几何变换,以及更复杂的仿射和透视变换。对于动态场景,可能还需要考虑时间相关的运动模型。
最后,教程指出该领域的开放性研究问题,可能包括如何提高对齐精度、如何处理更大的视差、如何在复杂环境下(如快速移动物体、光照剧烈变化)实现更好的拼接效果,以及如何实现更加自然和无缝的图像融合。
图像拼接处理是一个涉及多种技术和算法的复杂过程,它在摄影、虚拟现实、地图制作等多个领域都有广泛的应用。理解和掌握这些技术对于提升图像处理能力至关重要。
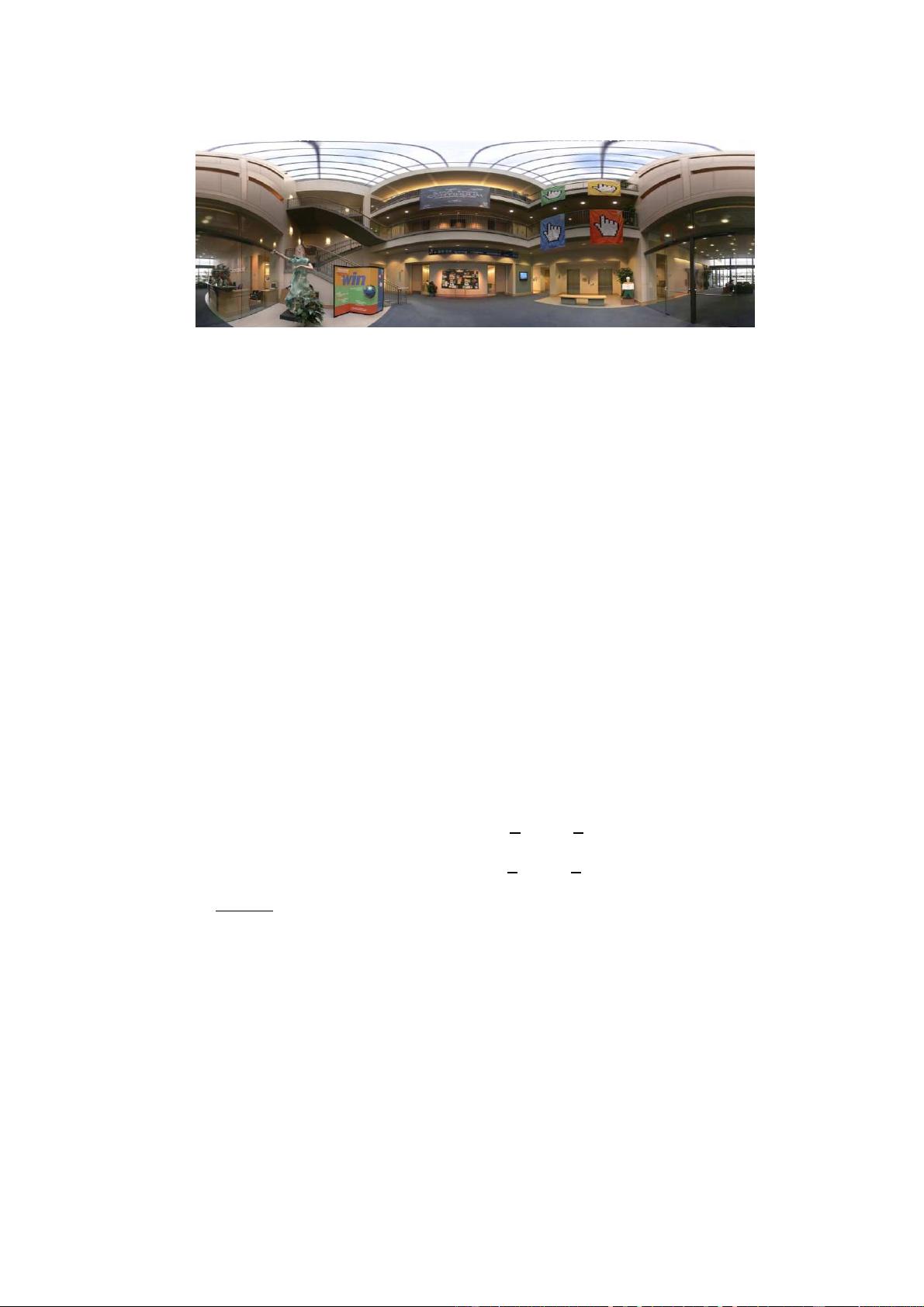
Figure 8: An example of a spherical panorama constructed from 54 photographs.
Professional panoramic photographers sometimes also use a pan-tilt head that makes it easy to
control the tilt and to stop at specific detents in the rotation angle. This not only ensures a uniform
coverage of the visual field with a desired amount of image overlap, but also makes it possible
to stitch the images using cylindrical or spherical coordinates and pure translations. In this case,
pixel coordinates (x, y, f) must first be rotated using the known tilt and panning angles before
being projected into cylindrical or spherical coordinates (Chen 1995). Having a roughly known
panning angle also makes it easier to compute the alignment, since the rough relative positioning
of all the input images is known ahead of time, enabling a reduced search range for alignment.
Figure 8 shows a full 3D rotational panorama unwrapped onto the surface of a sphere (Szeliski and
Shum 1997).
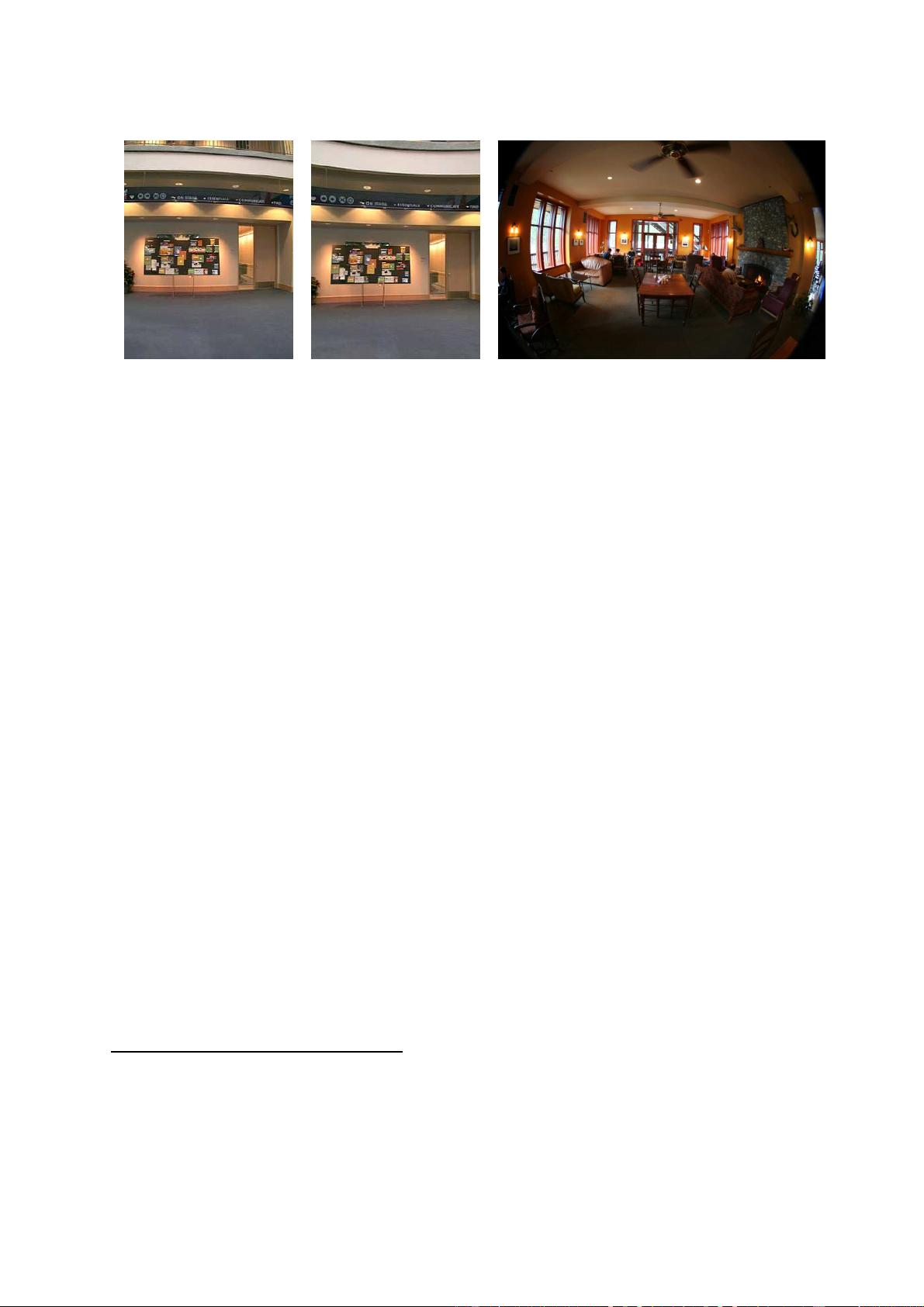
One final coordinate mapping worth mentioning is the polar mapping where the north pole lies
along the optic axis rather than the vertical axis,
(cos θ sin φ, sin θ sin φ, cos φ) = s (x, y, z). (40)
In this case, the mapping equations become
x
′
= sφ cos θ = s
x
r
tan
−1
r
z
, (41)
y
′
= sφ sin θ = s
y
r
tan
−1
r
z
, (42)
where r =
√
x
2
+ y
2
is the radial distance in the (x, y) plane and sφ plays a similar role in the
(x
′
, y
′
) plane. This mapping provides an attractive visualization surface for certain kinds of wide-
angle panoramas and is also a good model for the distortion induced by fisheye lenses, as discussed
in §2.4. Note how for small values of (x, y), the mapping equations reduces to x
′
≈ sx/z, which
suggests that s plays a role similar to the focal length f.
13


剩余88页未读,继续阅读
2019-12-04 上传
2014-06-03 上传
2023-05-31 上传
2023-05-31 上传
2023-04-27 上传
2024-01-25 上传
2023-04-23 上传
2023-07-13 上传

baidu_21247875
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
