基于插值的动态DS-OTHR阵列重构:关键技术与应用
120 浏览量
更新于2024-08-26
收藏 781KB PDF 举报
本文主要探讨的是"基于插值的运动DS-OTHR阵列重构算法"。DS-OTHR(分布式舰载超视距雷达)是一种新兴的舰载雷达探测系统,因其在海洋监视和目标定位方面的潜力,正在成为舰载超视距雷达研究领域的一个重要方向。阵列重构和信号重构是这类雷达系统中的关键技术,它们对于实现对移动目标的精确测量至关重要。
阵列重构是指将分布式接收子阵的信号有效地组合起来,形成一个虚拟的、性能更强的接收天线阵列。在传统的DS-OTHR系统中,当子阵分布在不同的基线上且工作时间不同时,如何保证信号的准确融合和重构是一项挑战。作者Ji、Ding、Xie、Junhao、Lu、Shan和Jiang针对这一问题提出了一个新的方法,即利用插值技术来处理时间变化的雷达系统,特别是那些由均匀线性子阵(ULSA)构成的不同基线下的情况。
插值技术在信号处理中扮演着关键角色,它能有效地填充缺失的数据点,使得阵列数据在时间维度上连续,从而改善系统的频率响应和动态范围。在本文中,作者可能探讨了如何通过设计特定的插值函数(如线性插值、多项式插值或样条插值等),结合多路径信号的时间延迟和幅度信息,来重建出在时间上连续的阵列响应。这种重构方法有助于减少噪声影响,提高空间分辨率,并且能够适应移动目标的复杂运动特性。
论文的核心内容可能包括以下几点:
1. 描述了DS-OTHR系统的基本原理和优势,以及阵列重构在其中的作用。
2. 提出了基于插值的阵列重构模型,解释了如何处理非同步和异步的ULSA信号。
3. 讨论了不同插值策略的适用性和优缺点,可能包括计算复杂度、稳定性和精度分析。
4. 可能展示了插值方法在理论上的分析,以及在实际应用中的仿真结果,证明其在移动DS-OTHR系统中的有效性。
5. 结论部分总结了研究的主要贡献,并对未来可能的研究方向进行了展望。
这篇研究论文对于理解分布式舰载超视距雷达技术的发展具有重要意义,特别是在阵列处理和信号融合方面提供了创新性的解决方案。它不仅为类似系统的设计者和工程师提供了一种实用的方法,还可能推动该领域的进一步研究和工程实践。
MOVING DS-OTHR ARRAY RECONSTRUCTION ALGORITHM BASED ON
INTERPOLATION
Ji, Zhenyuan, Ding, Jia, Xie, Junhao, Lu, Shan, Jiang, Xi
Department of Electronic Engineering, Harbin Institute of Technology
jizhenyuan@hit.edu.cn, giantpandading@163.com, xj@hit.edu.cn, eidolonking@gmail.com
ABSTRACT
Distributed shipborne over the horizon radar (DS-OTHR) is
a new radar detection system that becomes a new research
direction of shipborne OTHR. Array reconstruction and
signal reconstruction are the key techniques in the radar
system. Reasonable reconstruction for moving distributed
radar receiving subarrays can realize accurate measurement
of target. In this letter, we propose an interpolation approach
for time-varying radar system where uniform linear
subarrays (ULSA) are on different baselines, and apply the
approach to different conditions.
Index Terms—distributed shipborne OTHR; array
reconstruction; virtual interpolation
1. INTRODUCTION
Distributed shipborne over the horizon radar (DS-OTHR)
consists of one-transmit-multiple-receive or multiple-
transmit-multiple-receive ship formation [1]. It has the
advantage of anti-interference and high angular resolution.
Array reconstruction and signal reconstruction are the key
techniques in the radar system. Array reconstruction needs
real-time determination of each ship’s instantaneous spatial
location and to complete spatial alignment according to
coherent signal processing. Signal reconstruction requires
time alignment based on the location of each ship before
reconstruction and the location after virtual interpolation [2].
If the radar system satisfies reconstruction conditions, we
can use the virtual receiving array after reconstruction to do
signal processing in order to get higher angular resolution.
Up to now, many direction-of-arrival (DOA) methods
such as root-MUSIC, ESPRIT, forward-backward spatial
smoothing have developed. But they rely on uniform linear
array (ULA), don’t work in arbitrary geometry. In 1992,
Friedlander [3] presented an array interpolation approach
which transforms the response vector of an arbitrary array to
that of a ULA over an angular sector interpolation. Then
Pesavento [4] and Lau [5] developed this method. At present,
the array interpolation approach becomes a mainstream in
array reconstruction [6].
In this letter, we consider a radar system composed of
uniform linear subarrays (ULSA). These subarrays are on
different baselines, and have a mutual movement. During
the observation each subarray may change its position in an
arbitrary but known way. We complete array reconstruction
with segmentation-based interpolation method which can
reduce SNR attenuation compared with traditional
interpolation method. As ships sailing, the relative position
between receiving subarrays changes, and the array response
vector changes. Time-varying conditions would affect
angular resolution in the stage of signal reconstruction. In
this letter, we set an integration time to remove the
influence.
2. ARRAY SIGNAL PROCESSING MODEL
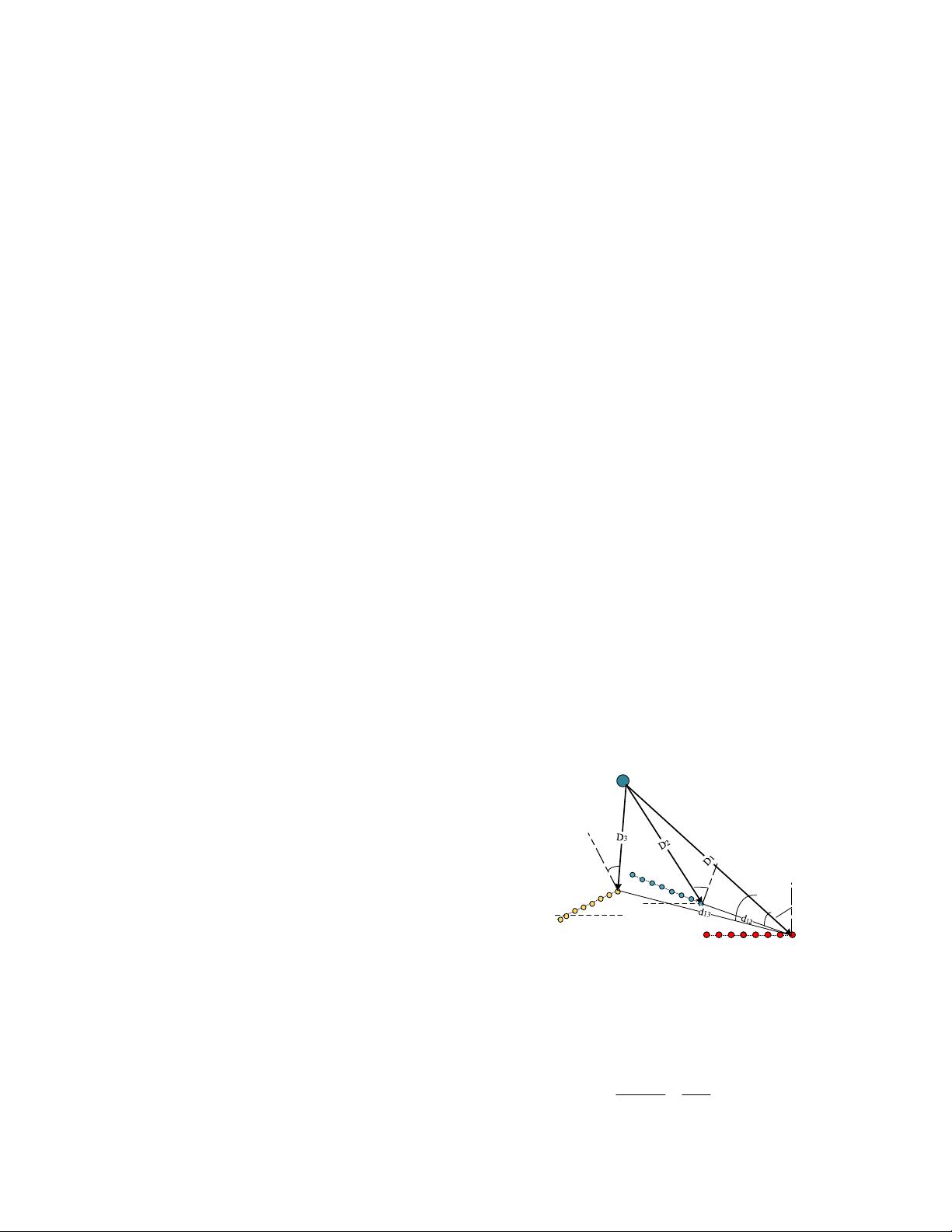
Consider three receiving subarrays on different baselines,
and each subarray is ULSA. Moving subarray response
vector is time-varying. The relative position of target and
subarrays are given in Fig.1, where r
k
(k=1, 2, 3) denotes
subarray in the radar system. “T” denotes the target.
Incident angle to subarray is given by θ
k
(k=1, 2, 3), and D
k
(k=1, 2, 3) denotes the distance from target to subarray. In
reality, D
k
is much longer. Before settling this model, it
needs to satisfy three terms: the number of sources is less
than the size of subarray, noise is white Gaussian and
uncorrelated in different moment.
T
θ
1
θ
2
θ
3
ψ
Φ
r
3
r
2
r
1
Fig. 1. The relative position of target and subarrays
Assume there are M
k
(k=1, 2, 3) elements in r
k
(k=1, 2,
3). Because subarrays are not collinear, r
2
and r
3
have delay
time compared to r
1
.The first element of r
1
is the reference
element as shown in Fig.1. The delay time is given by:
1
(2,3)
nn
n
DD D
tn
cc
−Δ
Δ= = =
(1)
ICSP2014 Proceedings
978-1-4799-2186-7/14/$31.00 ©2014 IEEE
312
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-02-21 上传
2021-03-06 上传
2021-03-15 上传
2021-03-25 上传
2021-08-15 上传
2021-03-14 上传

weixin_38635794
- 粉丝: 7
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- random
- Ajax+jsp+MySQL实现动态树形菜单
- AJAX_final
- jface:我的表盘
- Music and Lyrics-crx插件
- update
- Arduino-Eagle-Cad-Library:用于 Arduino Mini 和 Nano 的 Eagle Cad 库
- aabbtree-2.6.0-py2.py3-none-any.whl.zip
- Python3:Python 3项目
- seleniumKurs
- IterationBurndownAndScopeTracking:使用Lookback API构造燃尽图的Custom Rally应用程序,显示理想,最大和实际燃尽指标以及冲刺范围
- whiteboard::pencil:超简单共享白板
- 2013-2019年重庆理工大学817计算机基础综合考研真题
- 顶石2021
- worm
- WebUpd8-crx插件
