单片机PWM控制舵机技术详解
需积分: 10 8 浏览量
更新于2024-09-14
收藏 278KB PDF 举报
"是确定舵机的脉冲宽度与转角的关系,这通常需要通过实验得到;其次,设计一个能够产生精确PWM信号的程序。对于大多数舵机,脉宽在1.5ms到2.5ms之间变化,对应的转角大约是从0度到180度。更精确的调整需要对具体型号的舵机进行标定。
单片机控制舵机的基本步骤如下:
1. 初始化:设置单片机的定时器,使其工作在PWM模式,一般会选择一个中断周期与舵机所需的20ms基准周期相匹配的定时器。
2. 设置PWM占空比:通过改变定时器的预分频值或比较寄存器的值,调整PWM信号的高电平时间,从而改变占空比。这个过程通常在中断服务程序中完成。
3. 转角控制:根据需要转动的角度,计算对应的脉冲宽度,并将其转换为相应的占空比。
4. PWM输出:将计算出的占空比设置到PWM输出端口,单片机会自动按照设定的占空比生成PWM信号。
5. 实时调整:在运行过程中,可以通过读取传感器数据或其他输入,实时调整PWM占空比,从而控制舵机的角度。
为了保证控制的精度和稳定性,还需要考虑以下几点:
- 滤波处理:尽管单片机系统的抗干扰能力强,但仍然需要对输入信号进行滤波,以消除电源噪声和外部干扰。
- 上下限保护:设置PWM占空比的最小和最大值,防止舵机超限转动造成损坏。
- 响应时间:设计时要考虑舵机的动态响应特性,确保控制指令能及时被舵机响应。
- 功率驱动:确保单片机的输出驱动能力足以驱动舵机,可能需要额外的驱动电路来增强驱动能力。
- 热管理:长时间大功率运行的舵机会产生大量热量,需要考虑散热措施,避免过热导致故障。
总结起来,利用单片机进行舵机控制是一项涉及硬件设计和软件编程的综合任务。通过精确的PWM信号控制,可以实现对舵机的高精度和高稳定性控制,适用于各种需要角度精确变化的场景,如机器人、无人机、模型车辆等。在实际应用中,还需要根据具体项目需求,进行适当的优化和调整,以达到最佳的控制效果。"
利用单片机 PWM 信号进行舵机控制
写于: 星期二 03 一月 @ 00:30:21
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以
保持的控制系统。它可以在微机电系统和航模中作为基本的输出执行
机构,其简单的控制和输出使得单片机系统非常容易与之接口。
利用单片机 PWM 信号进行舵机控制
[日期:2005-10-15] 来源:今日电子 作者:北京交通大学 时玮
基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根
据不同的舵机数量加以灵活应用。
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微
机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系
统非常容易与之接口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制
系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏
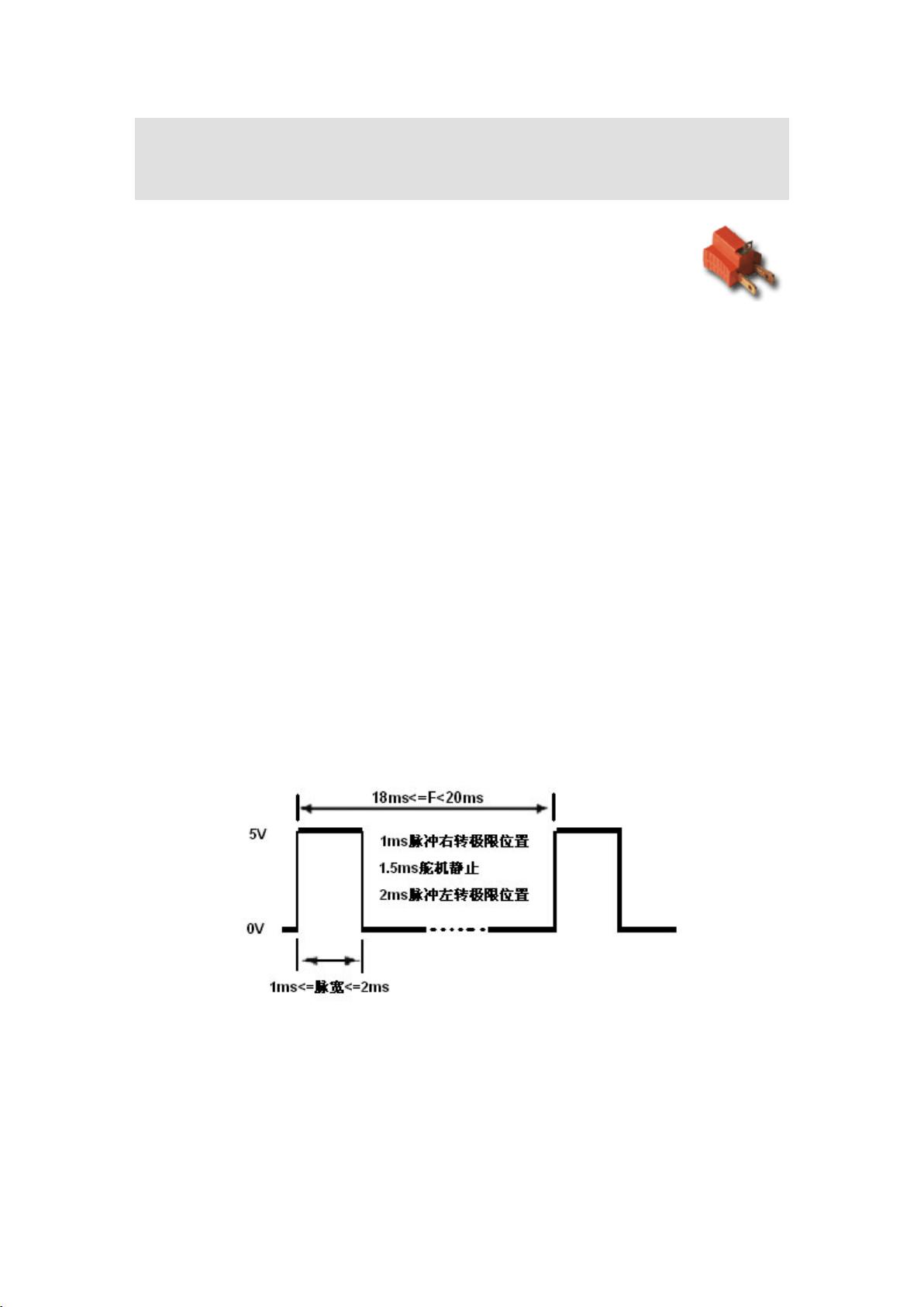
置电压。它内部有一个基准电路,产生周期为 20ms,宽度为 1.5ms 的基准信号,
将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的
正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速
齿轮带动电位器旋转,使得电压差为 0,电机停止转动。
图 1 舵机的控制要求
舵机的控制信号是 PWM 信号,利用占空比的变化改变舵机的位置。一般舵机的
控制要求如图 1 所示。
单片机实现舵机转角控制
下载后可阅读完整内容,剩余4页未读,立即下载
2014-04-10 上传
436 浏览量
373 浏览量
122 浏览量
964 浏览量
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传

yxqwyp8888
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
