第七届全国大学生智能汽车竞赛电磁组直立行车方案
需积分: 50 71 浏览量
更新于2024-07-19
收藏 9.72MB PDF 举报
"第七届全国大学生“飞思卡尔”杯智能汽车竞赛电磁组直立行车参考设计方案(版本2.0)"
本文档详细介绍了参加全国大学生“飞思卡尔”杯智能汽车竞赛电磁组直立行车项目的官方参考设计方案,旨在帮助参赛学生理解和构建两轮自平衡电动车模。该车模需具备直立行走的能力,对硬件设计、控制软件开发以及现场调试提出了更高的挑战。
首先,直立行走任务被分解为平衡控制、速度控制和方向控制三个关键部分。平衡控制是确保车模保持直立的关键,它涉及到对车模倾角和角速度的精确测量。速度控制则关乎车模前行的速度稳定,而方向控制则保证车模能按预定路径行驶。
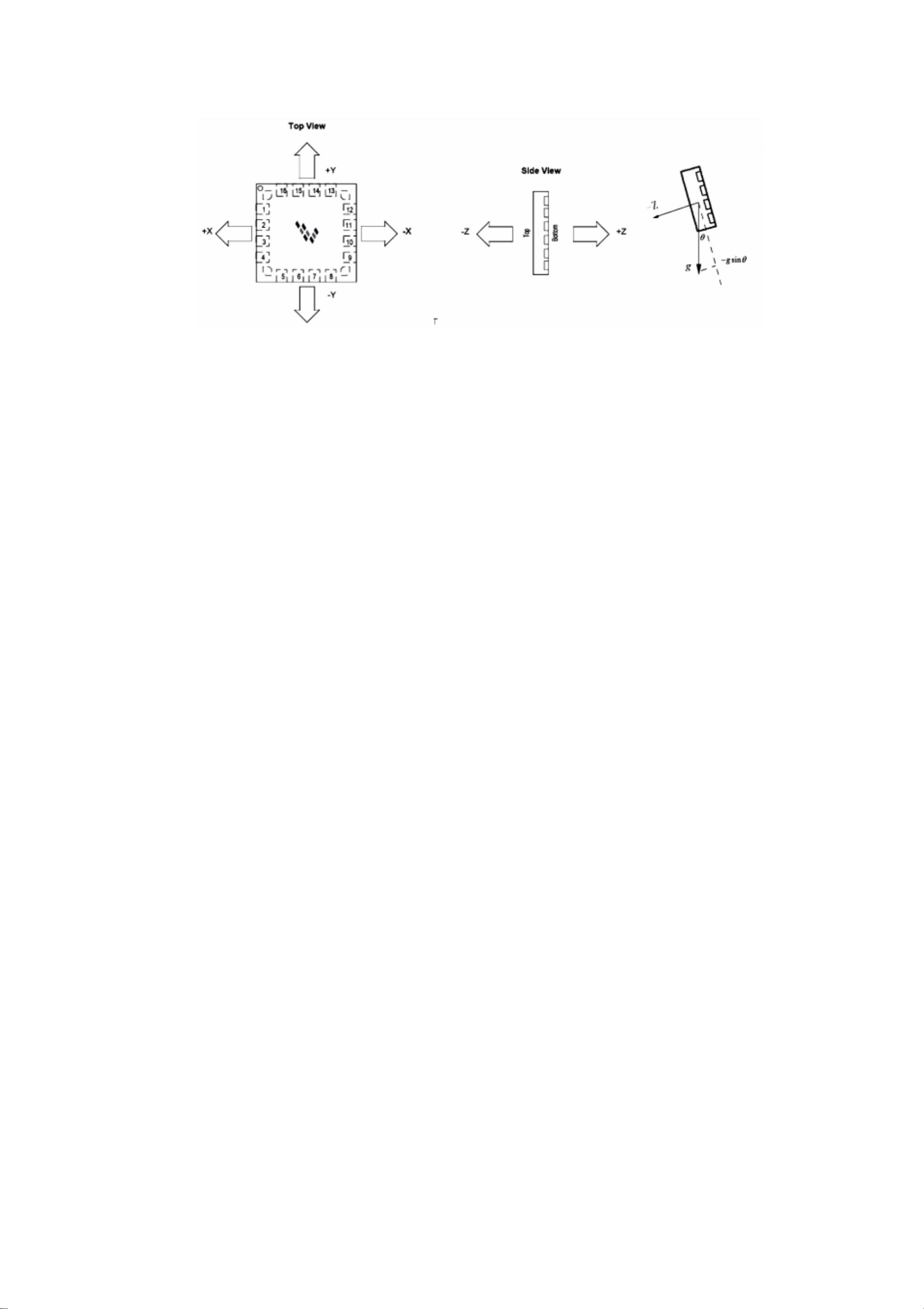
在原理篇中,文档深入解析了车模直立控制的原理,包括通过实时调整电机转速来抵消车模因倾斜导致的速度变化。车模的角度和角速度测量通常依赖于加速度传感器,如MMA7260,这些传感器能够提供车模在三维空间中的运动信息。车模速度控制通常采用PID(比例积分微分)控制算法,以确保速度的稳定。方向控制则通过调整两侧电机的转速差实现。
电路设计篇中,详细列出了整体电路框图,涵盖了DSC(数字信号控制器)介绍、单片机最小系统、倾角传感器电路、电机驱动电路、速度传感器电路、电磁线检测电路以及角度计算电路等。这些电路设计为车模提供了必要的感知和执行能力。
机械设计篇指导如何对车模进行简化改装,包括传感器的安装位置和注意事项,确保机械结构的稳定性和传感器的准确度。
软件开发篇涵盖了软件的功能框架、DSC的硬件资源配置以及主要算法的实现,包括PID控制器的编程和数据处理算法。
车模调试篇是整个方案的核心,提供了详细的调试参数、调试条件、桌面静态参数调试和现场动态参数调试的方法。此外,还讨论了方案改进和提高车模整体性能的可能性。
总结来说,这份参考设计方案为参赛者提供了全面的技术指导,从理论到实践,涵盖了直立车模设计的各个方面,有助于参赛者快速入门并提升技术水平。
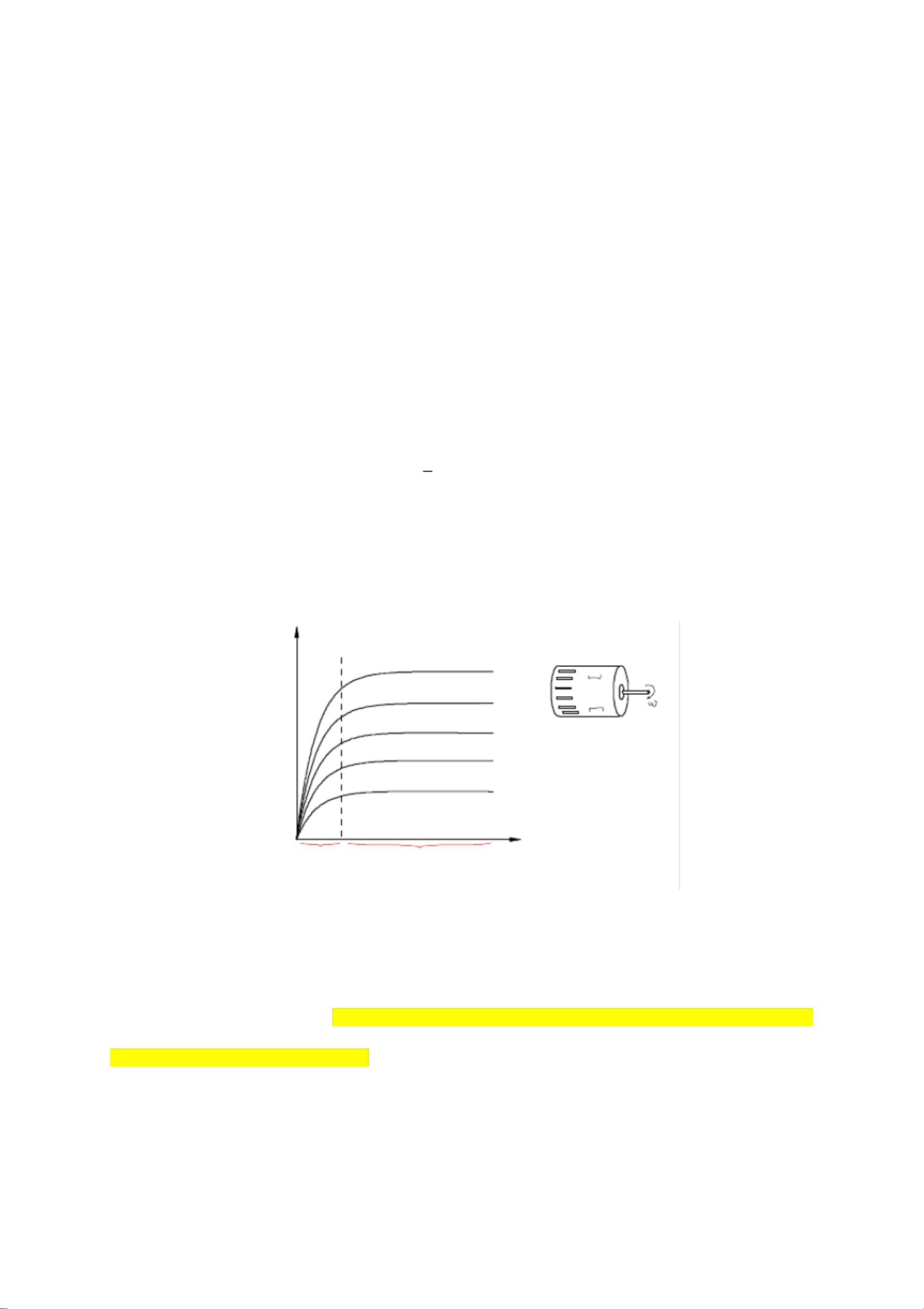
k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐ 10 车模控制两个系数作用
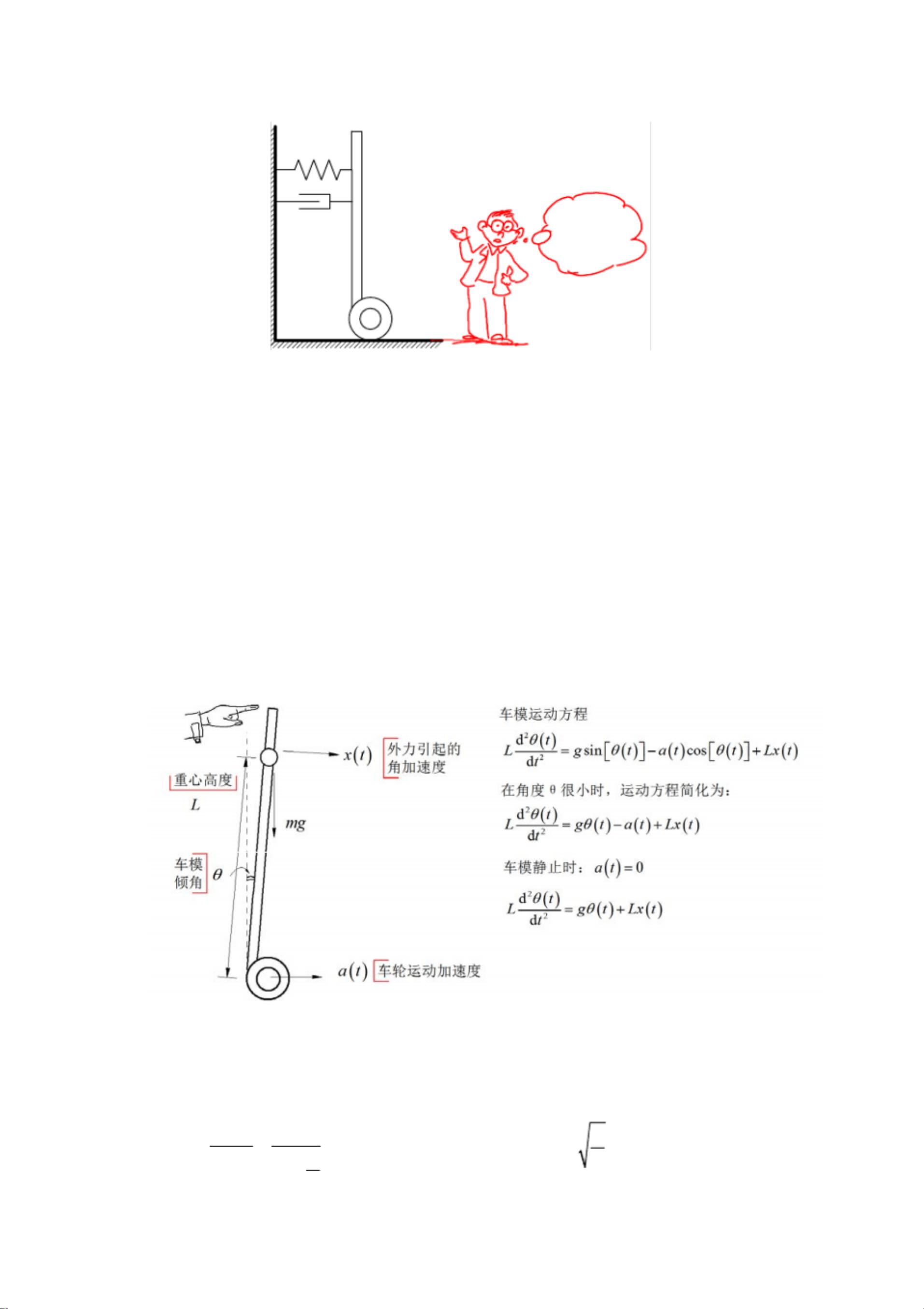
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆, 它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度
( )x t
。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度
( )a t ( )x t
之间的运动方
程。如图
2-11
所示。
图 2‐ 11 车模运动方程
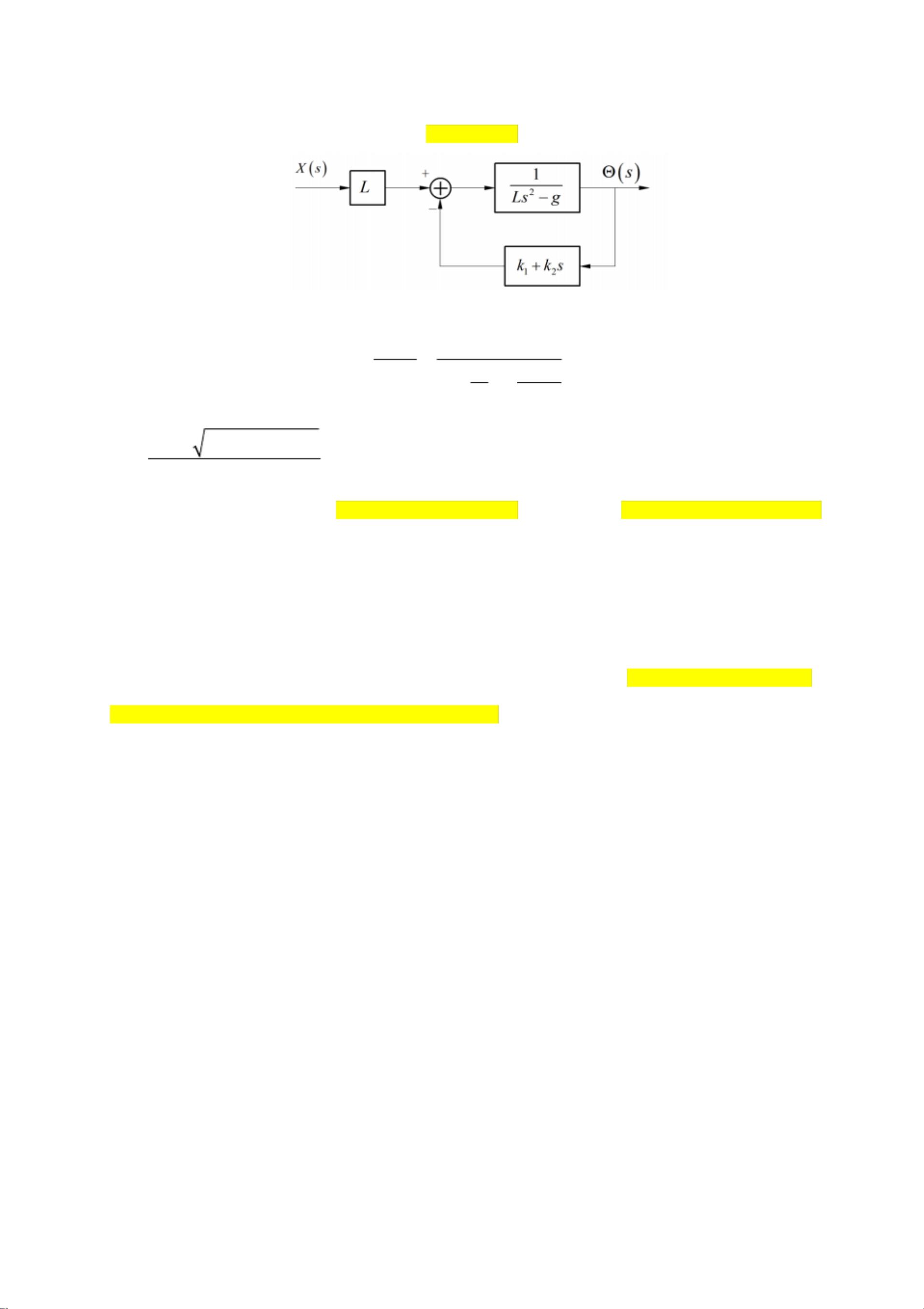
对应车模静止时,系统输入输出的传递函数为:
( )
( )
( )
2
1
s
H s
g
X s
s
L
Θ
= =
-
,此时系统具有两个极点
p
g
s
L
= ± 。一个极点位于 s 平面的
16

剩余107页未读,继续阅读
425 浏览量
628 浏览量
214 浏览量
2015-06-24 上传
161 浏览量
352 浏览量
点击了解资源详情

CVTorch
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 大酒店员工手册
- xoak-feedstock:一个xoak的conda-smithy仓库
- 文件夹
- 易语言源码易语言使用脚本开关系统还原源码.rar
- SleepDisplay:命令行工具可让您的Mac显示器直接进入睡眠状态
- Papara Excel İşlem Özeti-crx插件
- python程序设计(基于网络爬虫的电影评论爬取和分析系统)
- OlaMundo:Primeiro存储库
- 零售业管理:价格策略
- 投资组合
- java笔试题算法-Complete-Striped-Smith-Waterman-Library:Complete-Striped-Smit
- ros_arm_control.7z
- tripitaka:Tripitaka的依赖性很低,没有针对Node.js的简洁记录器
- 以品类管理为导向的连锁企业管理功能重组
- 长颈鹿
- 三菱Q系列PLC选型工具软件.zip
