多模型自适应控制在飞行控制重构中的应用
"这篇英文文献探讨了通过多模型自适应控制方法实现可重构飞行控制的策略,特别关注在传感器和执行器出现单个或双重故障情况下的系统适应性。作者PEI’ERS.MAYBECK和RICHARD D. STEVENS展示了多模型自适应控制器(MMAC)如何在这种故障情况下提供有效的重新配置能力。文献中还提到了增强MMAC性能的方法,包括计算MMAC假设的概率、使用最大后验概率(MAP)与贝叶斯形式的MMAC(或两者的组合)以及通过标量残差监控减少识别模糊性,特别是针对传感器故障的情况。该论文最初提交于1990年4月,经过修订后于1990年7月发布。"
这篇文献主要涉及两个关键领域:飞控技术和自适应控制。
1. 飞行控制(Fly Control):飞行控制是确保飞机在空中稳定飞行和完成各种任务的关键技术。文献中提到的可重构飞行控制是指系统能够根据不同的飞行条件和可能发生的故障进行自我调整和优化。在实际应用中,飞行控制系统需要能够应对传感器或执行器的故障,以确保飞行安全和任务完成。
2. 自适应控制(Adaptive Control):自适应控制是一种动态控制策略,它允许控制器根据被控对象的参数变化或不确定性进行自我调整。在本文中,多模型自适应控制器(MMAC)被提出,它能处理多种飞行模型,并在面临单个或多个传感器或执行器故障时,自动调整控制策略,保持系统的稳定性和性能。
MMAC的主要特点包括:
- 故障容忍度:即使有传感器或执行器失效,MMAC也能通过切换到其他可用模型来保持对飞行状态的有效控制。
- 性能优化:通过计算不同模型的后验概率,MMAC可以判断哪个模型更接近当前飞行状态,从而选择最佳控制策略。
- 识别模糊性减少:通过标量残差监控,系统可以更准确地识别传感器故障,减少错误诊断的可能性。
文献中的工作对于飞行控制系统的鲁棒性和适应性有着重要的理论和实践意义,对于航空电子系统的设计者和研究人员来说,这是一份有价值的研究资料。通过引入自适应算法,不仅提高了飞行控制系统的可靠性,也增强了其在复杂和不可预测环境中的表现。
4
Kalman filter
1
basedona,
r’
I
Hypothesis
conditional probability
computation
I
I’ I I
PZ
1
PK
r.
INPUTS
Rg.
1.
MMAC.
c
w-
SYSTEM SYSTEM
CGT
COMMAND
STATES
MODEL CONTROLLER
rc
r
_I
MEASUREMENTS
One expects the residuals
of
the Kalman filter
based upon the “best” model to have mean squared
value most in consonance with its
own
computed
&(ti),
while “mismatched” filters will have larger
residuals than anticipated through
Ak(fi).
Therefore,
(2),
(3),
and (6)-(12) will most heavily weight the
filter based upon the most correct assumed parameter
value. However, the performance
of
the algorithm
depends on there being significant differences in
the characteristics
of
residuals in correct versus
mismatched filters. Each filter should be tuned for
best performance when the “true” values
of
the
uncertain parameters are identical to its assumed
value for these parameters. One should specifically
avoid the “conservative” philosophy
of
adding
considerable dynamics pseudonoise, often
used
to
open
the
bandwidth
of
a single Kalman fdter to
guard against divergence, since this tends to mask the
differences between
good
and bad models. Specifically
for
this
reason,
LTR
tuning [12]
was
not employed for
robustness enhancement
of
each elemental controller
within the MMAC algorithm.
T
J\
f\
472
f\
f\
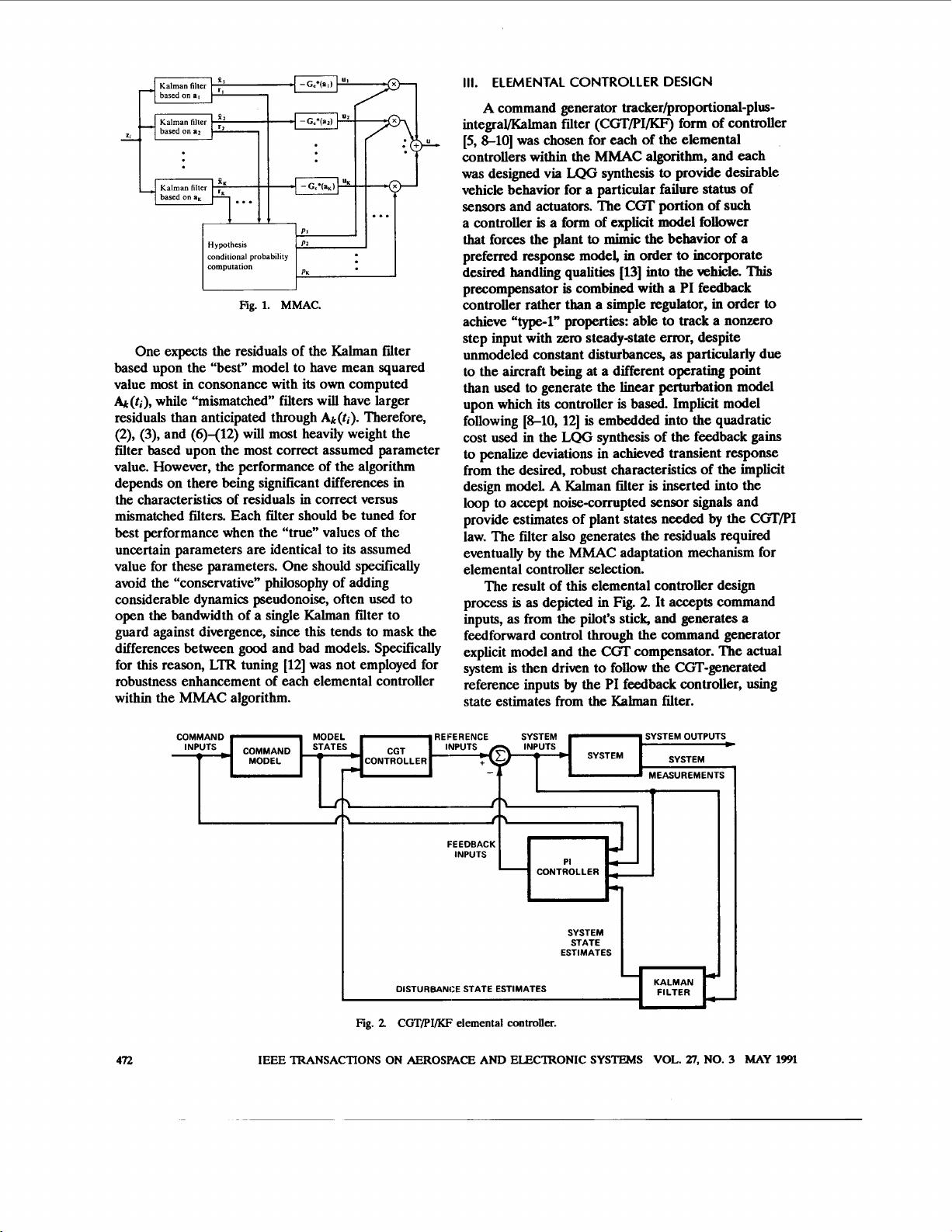
111.
ELEMENTAL CONTROLLER DESIGN
A
command generator
tracker/proportional-plus-
integralEdman filter (CGT/PI/KF)
form
of
controller
[S,
8-10]
was chosen for each
of
the
elemental
controllers within the MMAC algorithm, and each
was
designed via
LQG
synthesis
to
provide desirable
vehicle behavior for a particular failure status
of
sensors
and actuators. The CGT
portion
of
such
a controller
is
a
form
of
explicit
model follower
that
forces the plant
to
mimic the behavior
of
a
preferred response model, in order to incorporate
desired handling qualities
[13]
into the whicle.
This
precompensator
is
combined with a PI feedback
controller rather than a simple regulator, in order
to
achieve
“type-1”
properties: able to track a
nonzero
step input with
zero
steady-state error, despite
unmodeled constant disturbances, as particularly due
to the aircraft being at a different operating point
than
used
to
generate the
linear
perturbation model
upon which its controller is based. Implicit model
following [8-10, 121
is
embedded into the quadratic
cost
used
in the
LQG
synthesis
of
the feedback gains
to penalize deviations in achieved transient response
from the desired, robust characteristics
of
the implicit
design modeL
A
Kalman filter
is
inserted into the
loop to accept noise-corrupted sensor signals and
provide estimates
of
plant states
needed
by the CGT/PI
law. The fdter also generates the residuals required
eventually by the MMAC adaptation mechanism for
elemental controller selection.
The result
of
this elemental controller design
process
is
as depicted in Fig.
2
It accepts command
inputs, as from the pilot’s stick, and generates a
feedforward control through the command generator
explicit model and the CGT compensator. The actual
system
is
then driven to follow the CGT-generated
reference inputs
by
the PI feedback controller,
using
state estimates from the Kalman filter.
I
DISTURBANCE STATE ESTIMATES FILTER
r
7
KALMAN
CONTROLLER
L
FEEDBACK
INPUTS
I
SYSTEM
STATE
ESTIMATES
I
Fig.
2
CGT/PI/KF
elemental
controller.
IEEE TRANSACTIONS ON AEROSPACE
AND
ELECTRONIC
SYSTEMS
VOL.
27,
NO.
3
MAY
1991
剩余10页未读,继续阅读
相关推荐




liuzhi727
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易二维码签到系统:会议活动签到解决方案
- Ceres库与SDK集成指南:C++环境配置及测试程序
- 深入理解Servlet与JSP技术应用与源码分析
- 初学者指南:掌握VC摄像头抓图源代码实现
- Java实现头像剪裁与上传的camera.swf组件
- FileTime 2013汉化版:单文件修改文件时间的利器
- 波斯语话语项目:实现discourse-persian配置指南
- MP4视频文件数据恢复工具介绍
- 微信与支付宝支付功能封装工具类介绍
- 深入浅出HOOK编程技术与应用
- Jettison 1.0.1源码与Jar包免费下载
- JavaCSV.jar: 解析CSV文档的Java必备工具
- Django音乐网站项目开发指南
- 功能全面的FTP客户端软件FlashFXP_3.6.0.1240_SC发布
- 利用卷积神经网络在Torch 7中实现声学事件检测研究
- 精选网站设计公司官网模板推荐
