早熟小麦行检测:霍夫变换与消失点方法
135 浏览量
更新于2024-08-26
收藏 1.58MB PDF 举报
"这篇研究论文提出了一种基于霍夫变换和消失点的早熟小麦行检测方法,适用于早生长阶段的小麦田自主导航系统。该方法包括五个主要步骤:图像分割、特征点提取、候选小麦行估计、消失点检测以及真实小麦行检测。通过将彩色图像转换为灰度图像并进行前景背景分割,然后使用移动窗口和多级交错扫描策略提取表示小麦行中心的特征点。接着,应用霍夫变换方法提取直线以估计所有可能的候选小麦行。第四步是利用k-均值聚类算法对直线进行分类,以确定最有可能的小麦行。最后,基于消失点检测的结果,进一步精确定位实际的小麦行。关键词包括小麦行检测、自主导航、霍夫变换、消失点和k-均值聚类。"
在农业自动化领域,精确地检测作物行对于精准农业和自主导航系统至关重要。这篇论文提出的方法特别针对早熟小麦的生长阶段,这个阶段的小麦植株相对矮小且行间距可能不规则,因此检测具有挑战性。首先,图像预处理是基础,将彩色图像转为灰度图像可以减少计算复杂性,并通过分割技术区分小麦植株与背景。特征点提取利用移动窗口和多级交错扫描策略,能够有效地捕获小麦行的中心位置,这是后续步骤的关键输入。
霍夫变换是一种经典的线和圆检测方法,论文中用于提取可能的小麦行直线。它通过在参数空间中累积图像像素的直线条数来找到最显著的直线,这在寻找可能的小麦行边界时非常有效。然而,由于田间环境的复杂性,可能会得到许多候选直线,因此需要进一步处理。
k-均值聚类在这里用于对这些直线进行分类,它能将相似的直线归为一类,帮助减少噪声和误检,从而确定最可能代表小麦行的直线。消失点检测是另一关键步骤,尤其在有透视畸变的场景中,消失点可以提供关于图像平面中直线方向的重要信息,有助于识别真实的作物行方向。
论文最后的“真实小麦行检测”步骤利用上述信息,结合消失点和直线信息,更准确地确定小麦行的位置。这种方法对农业机器人在麦田中的自主导航特别有用,可以引导它们沿着小麦行精确行驶,进行播种、施肥或收割等操作,提高农业生产效率和精度。
这篇研究论文提出了一个实用且有效的早熟小麦行检测算法,结合了图像处理、特征提取、几何分析和机器学习技术,为农业自动化提供了有力的工具。
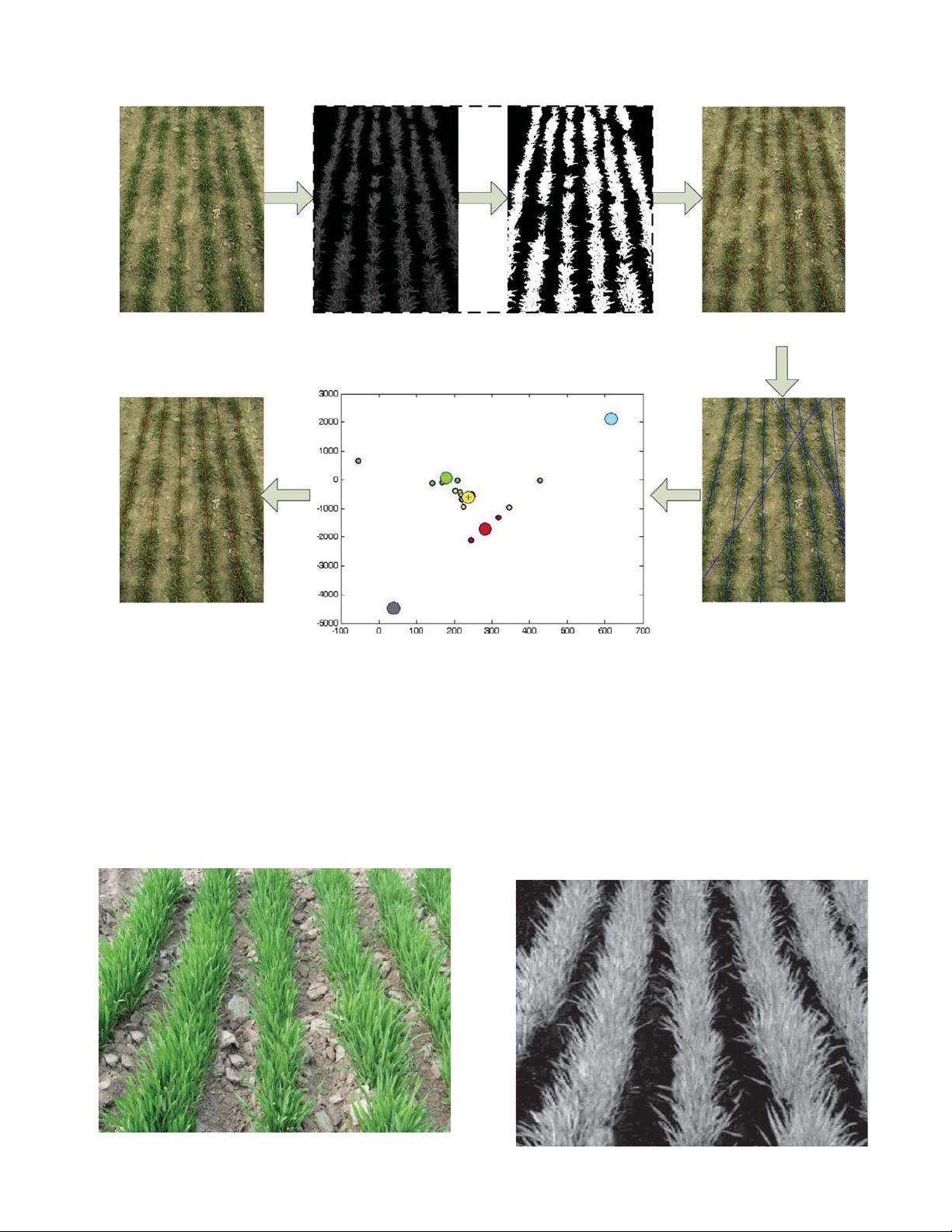
Image processing was implemented using a personal computer
with an Intel Core 2 Duo CPU, 2.60 GHz, 1.88 GB RAM, and the algo-
rithm was performed using MATLAB R2009a (Math Works) under a
Windows 7 operating system.
2.2. Image segmentation
A color image was transformed to a gray-level image with
enhanced contrast between green vegetation and the background.
The color Excess Green index ExG =2G R B (Rosset et al., 1985;
Søgaard and Olsen, 2003; Zhang et al., 2008) was used. Fig. 3 shows
the result of gray-level transformation for Fig. 2
After the gray-level transformation, Otsu’s method (Otsu,
1979), which was widely used in many studies (Meyer and
Neto, 2008; Jiang and Zhao, 2010; Burgos-Artizzu et al., 2011;
Jiang et al., 2015) was applied to achieve the binarization.
Fig. 4 shows the binary image obtained from the gray-level
image illustrated in Fig. 3. As expected, the living vegetation is
Image segmentationInput Feature points extraction
Candidate wheat rows
estimation
Real wheat rows
detection
Vanishing point detection
Fig. 1. Flow diagram of the wheat rows detection algorithm, which includes five steps: (1) image segmentation, (2) feature points extraction, (3) candidate wheat rows
estimation, (4) vanishing point detection, the point with a plus sign is the vanishing point we detected and (5) real wheat rows detection.
Fig. 2. A color image of wheat sample. (For interpretation of the references to color
in this figure legend, the reader is referred to the web version of this article.)
Fig. 3. Gray-level image obtained with 2G R B for Fig. 2.
G. Jiang et al. / Computers and Electronics in Agriculture 123 (2016) 211–223
213
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2010-05-17 上传
2021-09-29 上传
2014-05-10 上传
2023-05-26 上传
2023-05-26 上传
2023-05-02 上传

weixin_38713586
- 粉丝: 3
- 资源: 933
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
