仿人步行机器人控制系统与算法研究
需积分: 10 185 浏览量
更新于2024-07-15
收藏 1.91MB PDF 举报
"该文档是关于仿人步行机器人控制系统设计的研究,涵盖了机器人技术的重要性、双足步行机器人的应用前景、控制系统的设计以及控制算法的实现。文章深入探讨了控制系统的硬件选择、软件实现、通信机制、运动学和动力学建模、稳定性控制策略,以及PID控制算法在实际机器人系统中的应用。"
在当前的科技发展中,机器人技术扮演着至关重要的角色,它是衡量一个国家技术实力的重要标志。随着机器人技术的不断发展,它们已经超越了工业领域的应用,逐渐渗透到军事、医疗、服务和娱乐等多个非工业领域。预计在21世纪,机器人技术将会取得更大的突破,成为全球知识经济的核心竞争力。
仿人步行机器人作为机器人研究的重要分支,因其双足行走的灵活性,尤其适合在日常环境中与人类协同工作,执行如康复、日常服务和危险环境作业等多种任务,具有巨大的应用潜力。鉴于此,研究仿人步行机器人不仅具有深厚的学术价值,还具有显著的实践意义。随着理论和技术的提升,构建高度智能化的仿人机器人已成为可能。
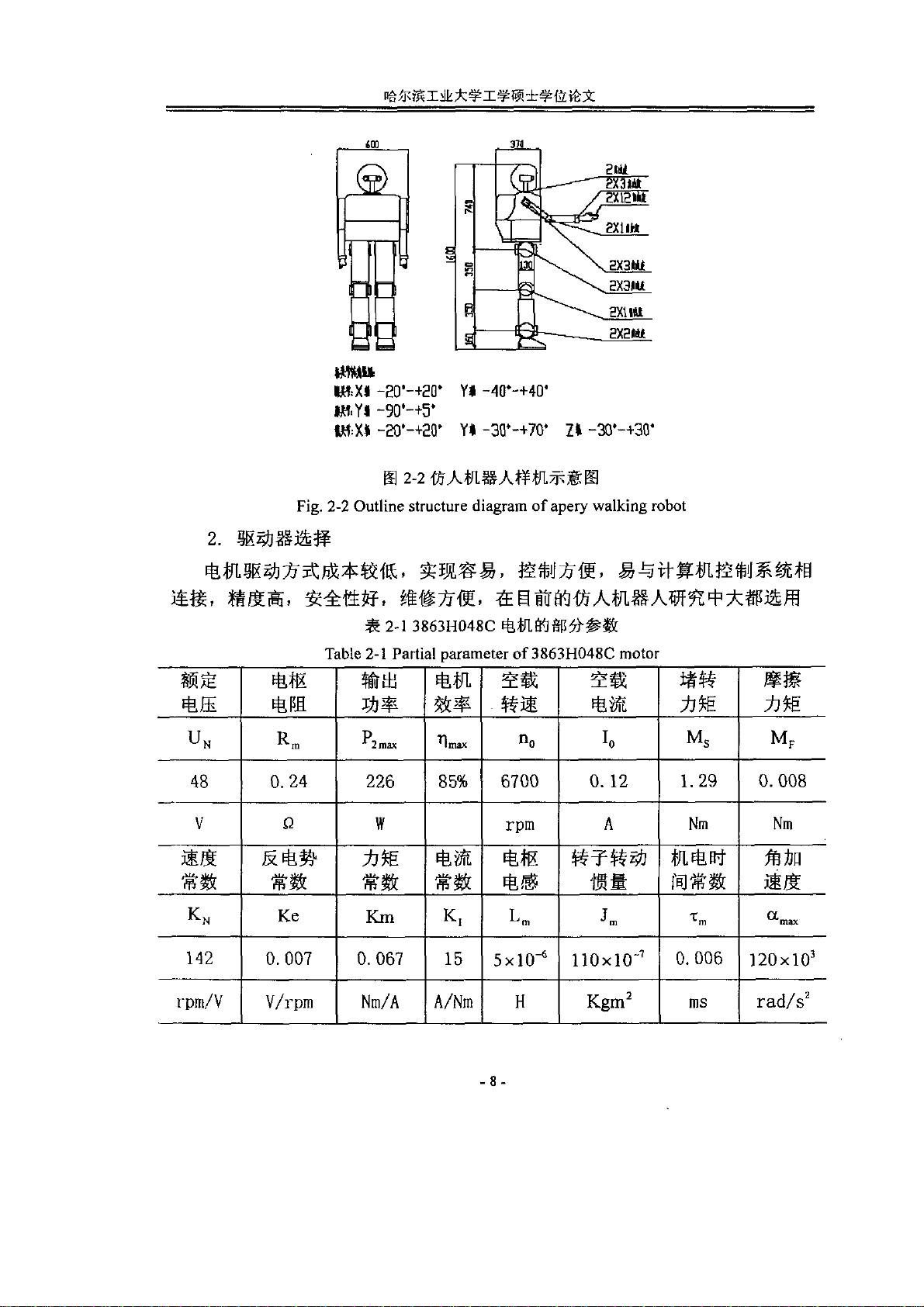
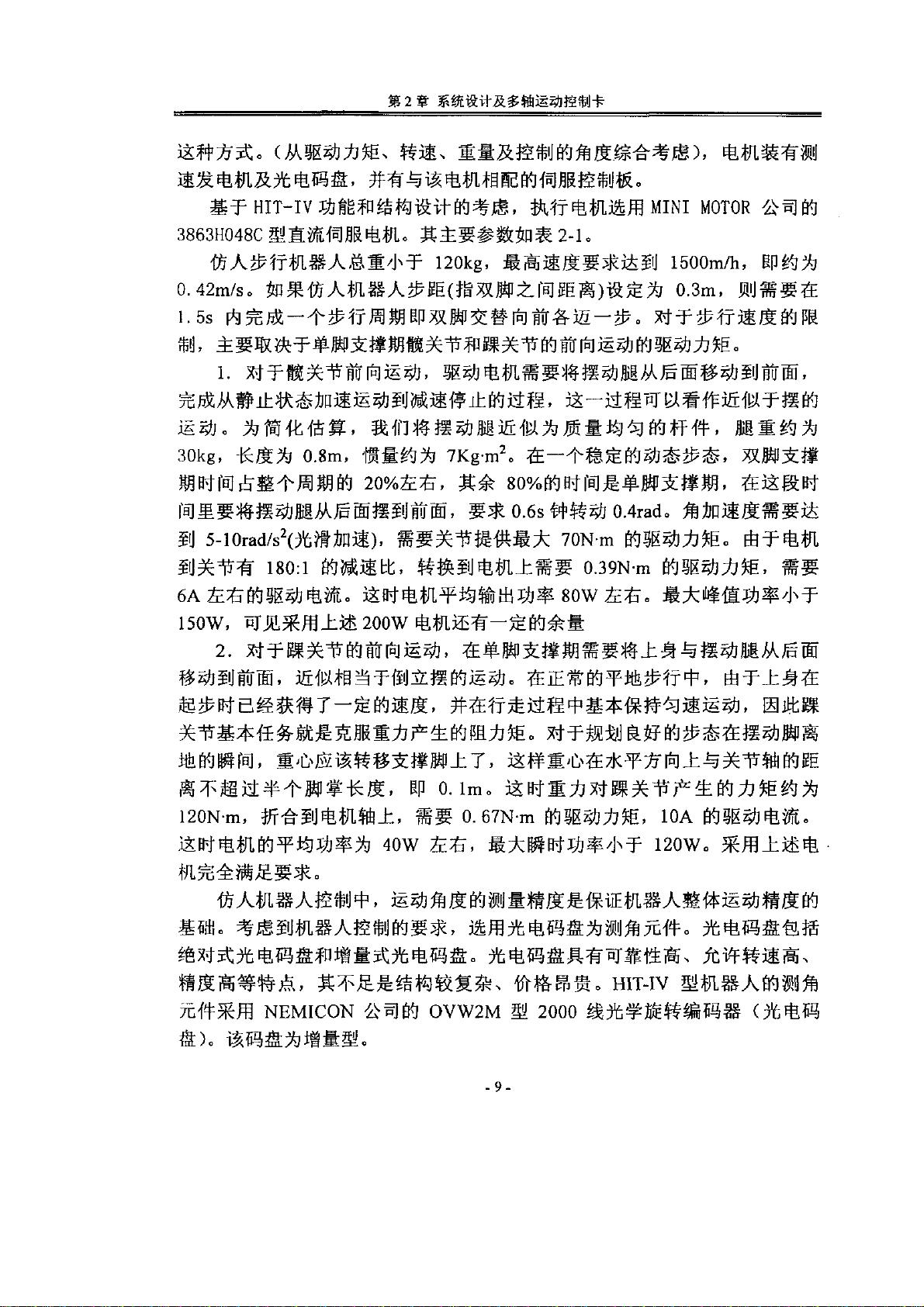
本文主要关注的是HIT-1V型仿人步行机器人的控制系统设计。其中,分析了机器人的机构设计和控制系统的架构。为了实现下肢12个关节的协调运动,选择了多轴运动控制卡,并详细介绍了其使用方法和编程思路。同时,通过在控制卡上设置双口可读写寄存器,实现了实时调整机器人步态,详细阐述了通信驱动函数库在主机、控制卡和寄存器之间通信的角色。
此外,建立了机器人各关节的坐标系,定义关节变量,推导出运动学和动力学模型。针对多连杆、强耦合、非线性的机器人模型以及地面反力对行走稳定性的影响,研究了分级递解控制、地面反力的柔顺控制和关节力矩控制三种控制策略。
控制系统软件实现被划分为两部分:步态数据读入和机器人运动编程。前者负责将大量数据从主机传输到PMAC,后者则实现从主机发出控制指令,控制机器人进行起步、行走、转身和停步等动作。最后,采用PID控制算法对关节进行控制,并给出了PID参数的选择原则以及四个关节的实际运动曲线。
关键词: 仿人步行机器人、多轴运动控制器、柔顺控制、PID控制算法。这份研究详尽地揭示了仿人步行机器人控制系统的复杂性和创新性,为未来相关领域的研究提供了宝贵的理论基础和技术参考。

剩余64页未读,继续阅读
2021-08-12 上传
2019-09-05 上传
2021-08-14 上传
2021-09-04 上传
2019-08-13 上传
2022-01-20 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传

十方世界
- 粉丝: 1
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- react_website
- HCMGIS_Caytrong_Local
- 毕业设计&课设--毕业设计之鲜花销售网站的设计与实现.zip
- django-compiling-loader:Django的编译模板加载器
- Excel模板送货单EXCEL模板.zip
- tfbert:一个使用tf2复现的bert模型库
- 商用服务机器人行业研究报告-36氪-2019.8-47页.rar
- 愤怒的小鸟
- recommend-go:用户偏好推荐系统
- react-selenium-ui-test-example:示例项目显示了如何将Selenium Webdriver与Mocha结合使用以在本地环境中运行UI级别测试
- AttachmentManager:附件管理器库从Android设备中选择文件图像
- Excel模板财务报表-现金收支日记账.zip
- jquery-browserblacklist:处理浏览器黑名单的 jQuery 插件
- 毕业设计&课设--毕业设计--在线挂号系统APP(VUE).zip
- 017.长治市行政区、公交线路、 物理站点、线路站点、建成区分布卫星地理shp文件(2021.3.28)
- yfcmf-tp6:yfcmf新版本,基于thinkphp6.0和fastadmin
