图论算法精要:强连通分量、欧拉回路与拓扑排序详解
需积分: 0 156 浏览量
更新于2024-08-05
收藏 595KB PDF 举报
经典算法笔记1主要涵盖了图论中的几个核心概念和问题解决方法,包括最小费用最大流、强连通分量、欧拉回路、拓扑排序以及关键路径与关键节点(AOE网)。让我们逐一深入解析这些重要算法。
1. **最小费用最大流**:
最小费用最大流问题源于实际中的物流或网络流问题,其中每条边都有容量限制且带有成本。该问题的目标是在不违反边的容量约束条件下,找到使总成本最低的流量分配方案。算法通常使用Ford-Fulkerson方法或Edmonds-Karp算法来求解。
2. **求有向图的强连通分量**:
通过预后序遍历(pre[]和post[]数组)和全局变量clock,首先反向构建图Gr,然后对每个节点调用explore函数进行深度优先搜索(DFS),填充pre和post值。最后,根据post数组降序排序并应用无向图的连通分量算法,能确保得到正确的强连通分量。
3. **欧拉回路与简单路径**:
欧拉回路是图中一条经过所有边恰好一次的路径,若所有节点度数均为偶数,存在欧拉回路。通过无回溯DFS寻找,如果所有边都被访问,说明找到了欧拉回路;否则,继续寻找未访问过的路径,直到完成遍历。
4. **拓扑排序**:
在有向无环图(DAG)中,拓扑排序是一种线性化的表示方式,它确定了一个节点何时可以在其他节点之前开始执行。通过先处理入度为0的节点,逐步将它们添加到排序序列中,并更新后继节点的依赖关系。
5. **关键路径和关键节点(AOE网)**:
AOE网是活动-资源-时间网络,用于项目管理中的计划。关键路径是网络中耗时最长的路径,决定了整个项目的最早完成时间。关键节点是关键路径上的节点,其延误可能导致整个项目的延误。通过拓扑排序找出节点的最早和最迟开工时间,计算关键路径和关键节点。
这些算法在软件工程、数据结构、计算机网络等领域具有广泛应用,理解和掌握它们对于解决实际问题至关重要。理解算法背后的原理和应用场景,能帮助提升编程效率和解决问题的能力。
经典算法笔记
一、图论算法
1. 求有向图的强连通分量:
首先明确几个变量:开两个 pre[], post[]数组,代表着结点的前序编号和后序编号。
然后是 clock:全局的一个指示变量,用于让 pre 和 post 数组的元素离散递增。
explore 函数根据 clock,DFS 这张图,然后填上各节点的 pre 和 post 值。
a) 将图 G 反向(边取反),得到 Gr
b) for 每个节点,对 Gr 调用 explore(v),填完 pre 和 post 数组
c) 根据每个节点的 post 从大到小排序,按这个排序,对 G 调用无向图的连通分
量算法即可
正确性是因为 Gr 里 post 最大的那个一定在“sink”里,所以按照 post 降序遍历可
以得到正确的连通分量个数。
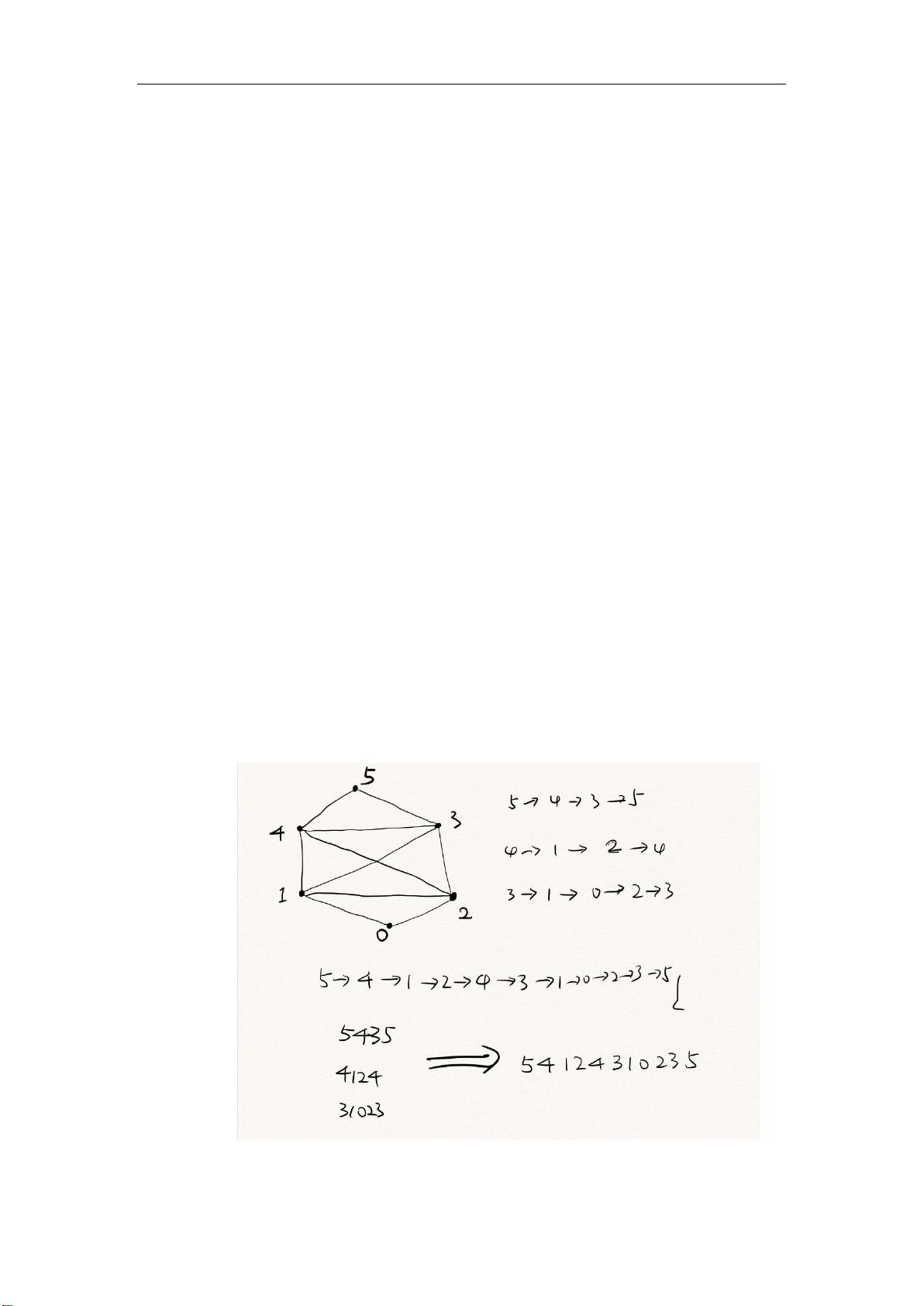
2. 欧拉回路:
首先判断是不是每个节点的度都是偶数,若不是,直接返回 false 输出空串
a) 随机选取一个节点进行没有回溯的 DFS(没有回溯就是没有那个 for 循环,而
是不断地 DFS(下一条邻边)这样),直到返回了最初的节点(期间访问过的边
不会再访问了,而访问过的结点还会)。
b) 若达到了所有边都访问过一次(即邻接表所有边的 vis 字段都设 true 了),那
么相当于已经完成了一笔画,返回最终答案即可
c) 若没有,则选择路径中还有邻边没访问的节点,进行没有回溯的 DFS,并将得
到的遍历序列合并到 ans 这个 string 中。
d) 重复 bc 直至所有边都被访问过
例如下面这样的:
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-01 上传
2022-08-03 上传
2021-09-30 上传
2021-10-01 上传
2019-03-01 上传
2018-09-26 上传

亚赛大人
- 粉丝: 33
- 资源: 332
 我的内容管理
展开
我的内容管理
展开







最新资源
- RPMA回传+ Arduino Yun –第3部分-项目开发
- easy-redux:简化redux api
- BarreOutils:锻炼巴雷特迪尔斯
- copylight:jQuery 插件为内容许可证提供视觉强化
- 2021最新孜然导航系统 v1.0
- 微信小程序-小厨房
- visibl:通过React HOC进行视口内检测
- canvasinvaders:HTML Canvas 上的太空入侵者(有点)
- clickhousewriter.zip
- 西门子PLC工程实例源码第637期:转速PID控制程序(双脉冲).rar
- 洗剂
- 物理和云Cayenne交换机-项目开发
- fit-text-to-screen:
- CSYE6220:CSYE6220的分配
- ChatBot
- FJLRS:费·琼斯实验室请求系统
