"模块四 ABB 机器人标准 IO 板配置与通信"
需积分: 5 56 浏览量
更新于2024-01-02
收藏 45.61MB DOCX 举报
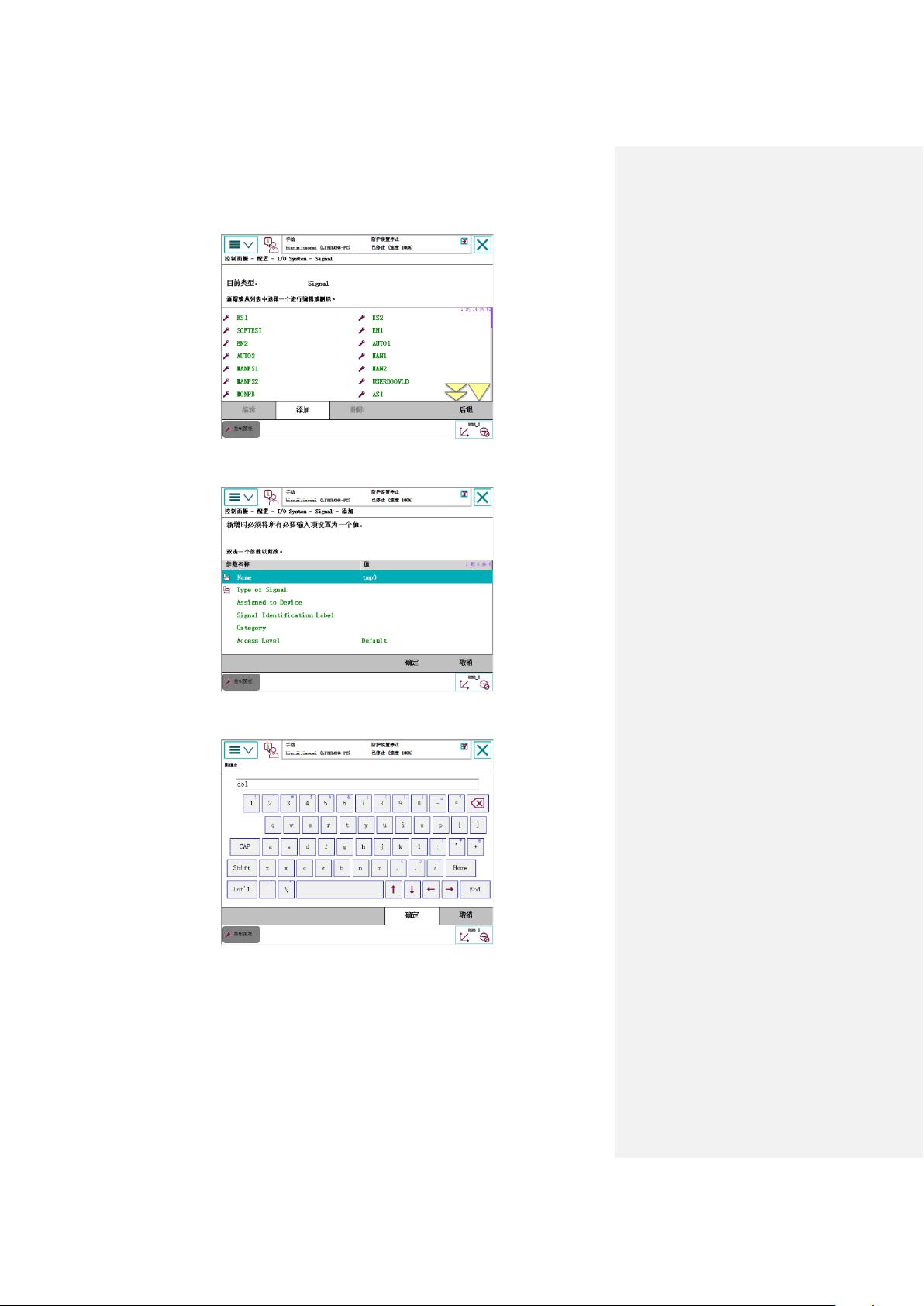
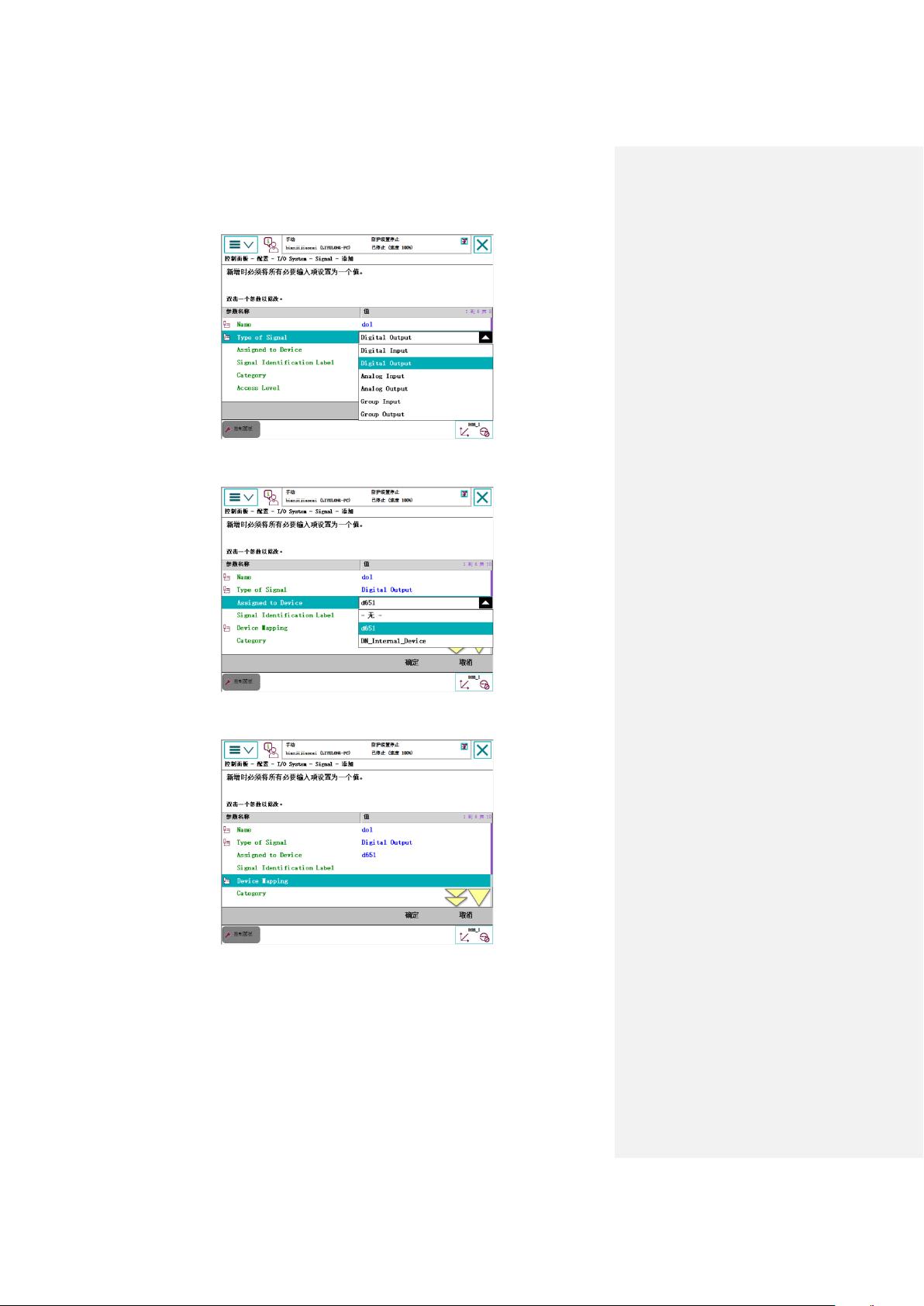
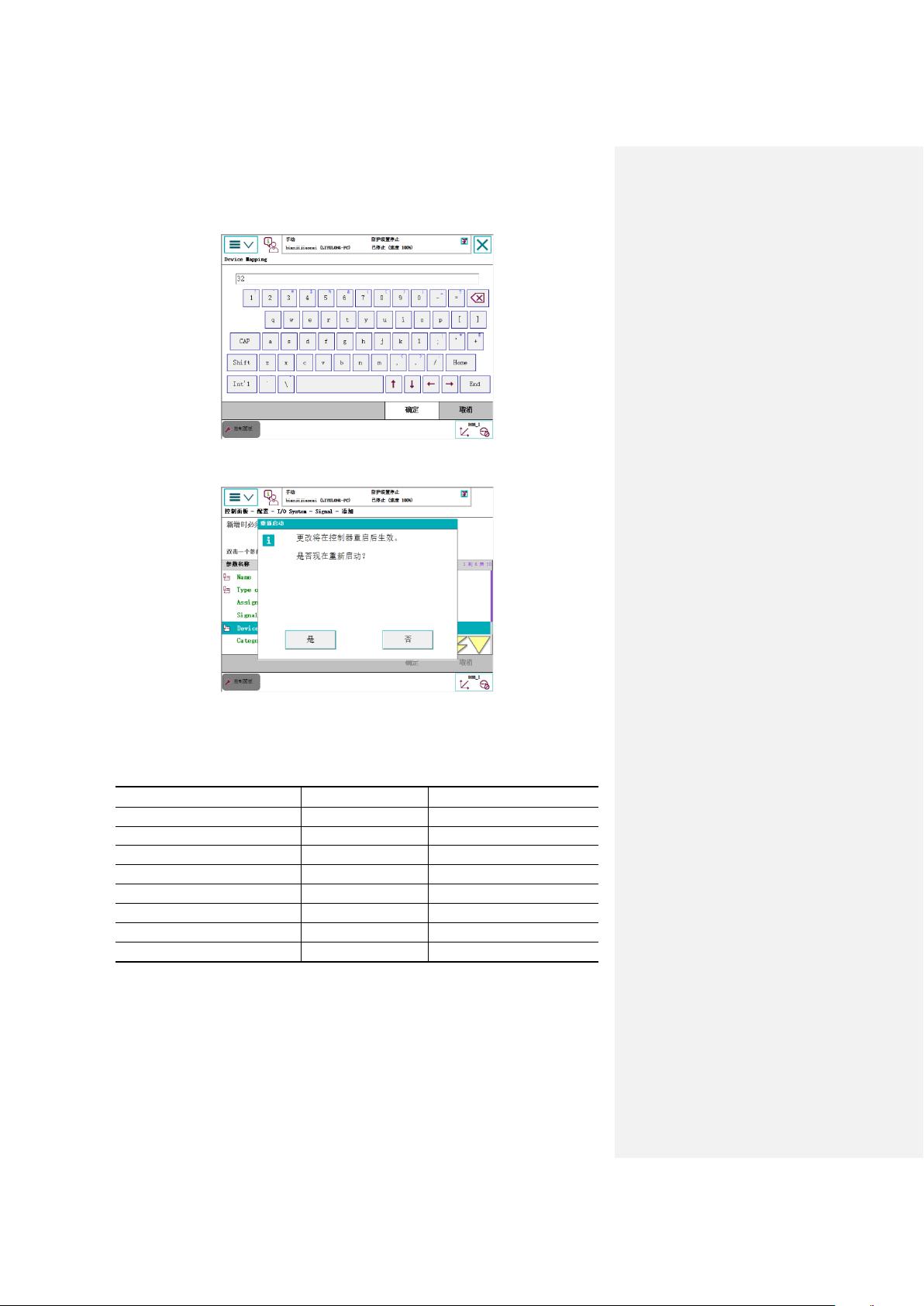
模块四《机器人编程控制》主要介绍了ABB机器人的IO通信和相关知识点以及技能点。其中,知识点包括ABB标准IO板的构成和作用,DSQC651和DSQC652的端子接口和地址分配。技能点包括ABB标准IO板的配置和系统输入输出与IO信号的关联操作。任务一中的ABB标准IO板的任务描述是认识ABB常用IO板的构成和作用,了解DSQC651和DSQC652上不同的端子接口和地址分配。
ABB机器人提供了丰富的IO通信接口,可以轻松实现与周边设备的通信。ABB标准IO板提供的常用信号处理有数字输入DI、数字输出DO、模拟输入AI、模拟输出AO,以及输送链跟踪。表4-1展示了ABB机器人IO通信接口的说明,其中常用的标准IO板有DSQC651和DSQC652。通过选配标准ABB的PLC,可以省去与外部PLC进行通信设置的麻烦,并且可以在机器人的示教器上实现与PLC相关的操作。
在模块四的学习过程中,我们了解到ABB标准IO板的构成和作用。ABB标准IO板主要包括数字输入DI、数字输出DO、模拟输入AI、模拟输出AO以及输送链跟踪等功能。其中,数字输入DI用于接收外部信号输入,数字输出DO用于控制外部设备,模拟输入AI用于接收模拟量信号,模拟输出AO用于输出模拟量信号。这些功能可以帮助机器人实现与周边设备的通信和控制。
除了了解ABB标准IO板的构成和作用,我们还学习了DSQC651和DSQC652上不同的端子接口和地址分配。DSQC651是分布式IO模块,主要用于扩展机器人的IO接口数量。DSQC651的端子接口包括数字输入DI模块、数字输出DO模块、模拟输入AI模块和模拟输出AO模块。每个端子接口都有对应的地址分配,通过分配不同的地址可以实现不同的功能和控制。
在完成任务一中的ABB标准IO板的任务描述时,我们需要认识ABB常用IO板的构成和作用,并了解DSQC651和DSQC652上不同的端子接口和地址分配。这样可以更好地理解和使用ABB机器人的IO通信功能,实现与周边设备的通信和控制。
总之,模块四《机器人编程控制》详细介绍了ABB机器人的IO通信和相关知识点以及技能点。通过学习与掌握这些内容,我们可以更好地理解和应用ABB机器人的IO通信功能,实现与周边设备的通信和控制。


2023-02-16 上传
2024-07-18 上传
2022-12-17 上传
134 浏览量
2023-03-03 上传
2022-06-09 上传

没钱充会员
- 粉丝: 0
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- List Issues-crx插件
- lokalise:从lokali.se检索本地化文件的工具
- TP002-控制LED灯翻转.zip
- 监控程序运行进程及系统CPU运行状态异常重启
- AprendeIngles:Proyecto App应用程序
- Mind-Robot:我正在构建一个意念控制机器人,使用 android、arduino 和 Mindwave 耳机
- 2021年毕业设计 (计算机科学与技术专业).zip
- plchdr-kt:Kotlin中的简单占位符生成器
- TP005-按键控制LED灯翻转.zip
- TabMania-crx插件
- librebook:使用Flutter构建的最小前端库创世客户端
- 易语言文件目录管理系统
- auspost:澳大利亚邮政网站库
- API菜单类-易语言
- javascript-technical-documentation:这是有关JavaScript某些方面的简短技术文档。 使用HTML和CSS制作
- 毕业设计.zip
