MAVLink微型飞行器通信协议详解与整合教程
需积分: 12 105 浏览量
更新于2024-07-16
1
收藏 3.53MB PDF 举报
MAVLink是一种专为微型飞行器设计的轻量级通信协议,它旨在高效地在飞行器与地面控制站之间传输数据。这款库主要支持C语言编程,适用于诸如Pixhawk、SLUGS和ArduPilot Mega等平台,这些平台通常配备有MCU(微控制器)、IMU(惯性测量单元)和Linux系统,用于实时的飞行控制和状态监控。
MAVLink的核心特性包括对数据头信息的有效管理和快速数据包传输,使得它能够在无人机与地面站之间建立可靠的通信链路。其设计初衷是简化飞行器与地面控制软件之间的交互,如ROS(机器人操作系统)集成,使开发者能够轻松地将mavlink整合到他们的自主飞行控制系统中。
对于集成教程,文档提供了三种常见的应用示例:
1. 板载集成教程:利用内置的自动驾驶仪软件,如mavlink自身提供的工具,帮助用户将mavlink无缝嵌入飞行器控制系统。
2. ROS集成教程:在微型空中机器人的开发中,mavlink被用于与ROS集成,以便实现更高级的功能,如路径规划和多机协同控制。
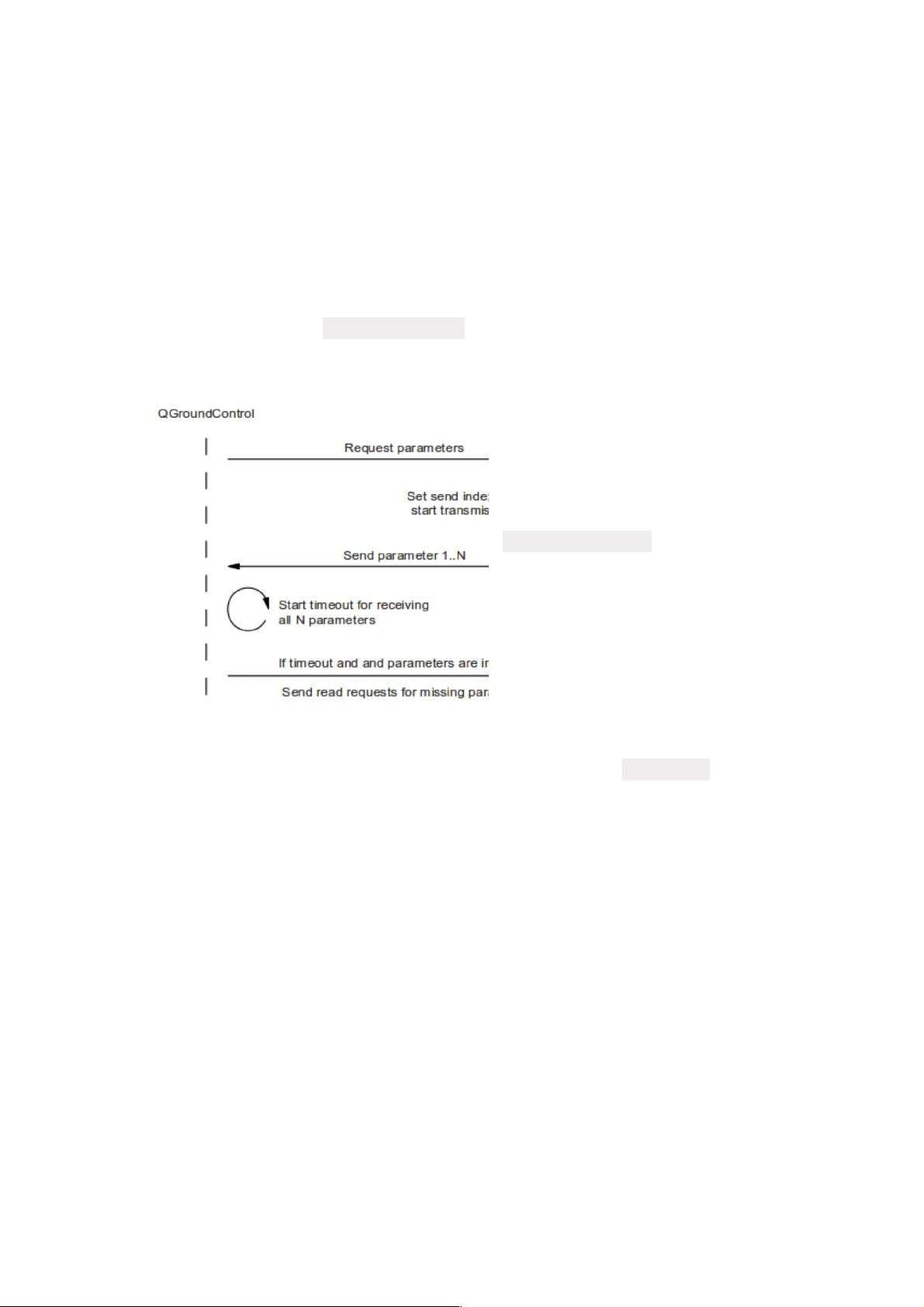
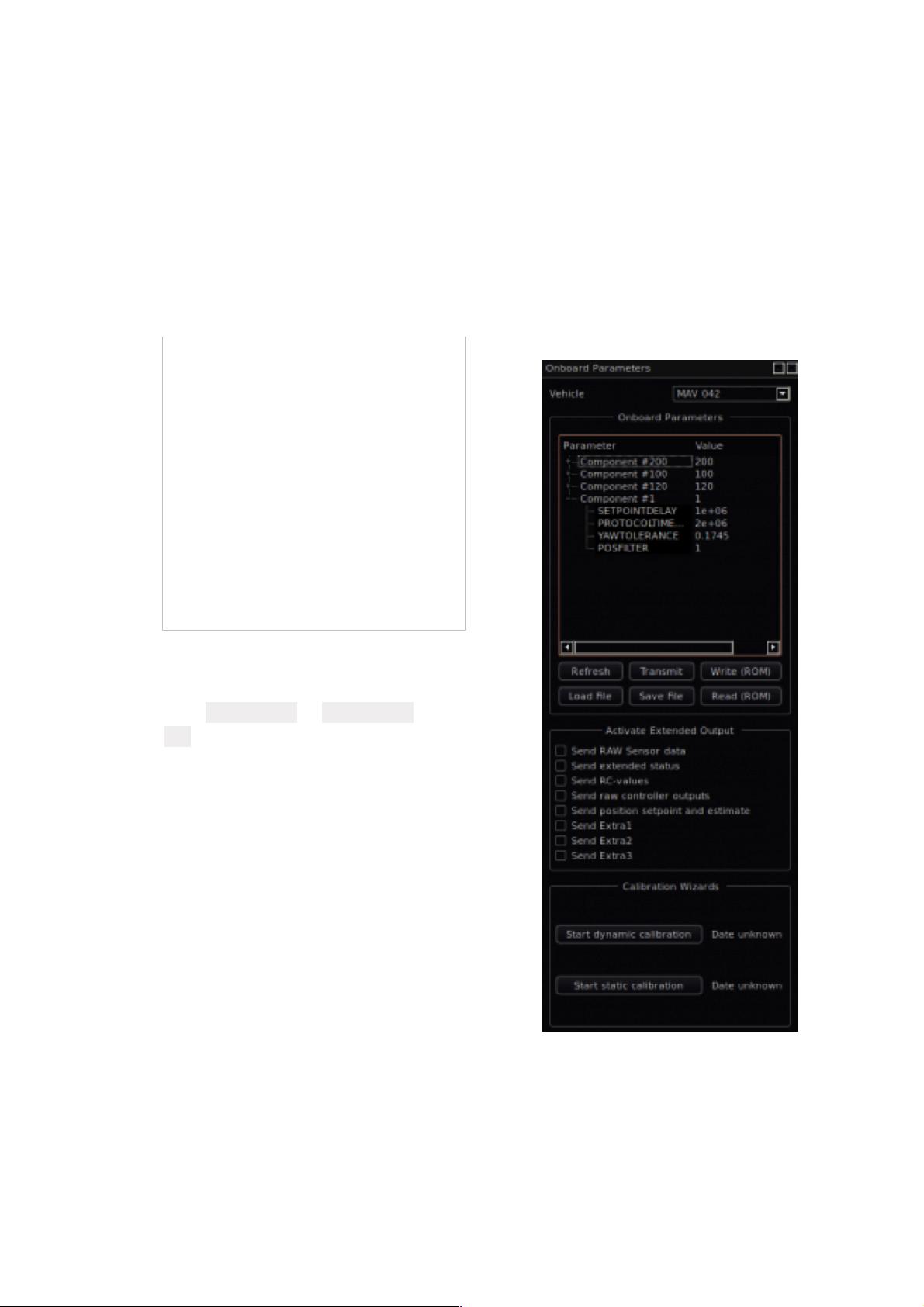
3. QGroundControl地面控制集成教程:QGroundControl是一个流行的地面站软件,它依赖于mavlink协议来接收和解析飞行器发送的数据。用户需确保至少每秒发送一次消息(1Hz),并理解QGroundControl中的设置对mavlink通信的影响。
此外,mavlink提供了一个通用的消息集,包含了广泛使用的通信内容。如果需要定制消息,开发者可以创建自定义的mavlink启动器或者利用现有的库,如Python版本。关于mavlink的编码、驱动代码和消息定义,可以从官方GitHub仓库获取,地址分别为:
- MAVLink消息定义和驱动代码仓库:<https://github.com/mavlink/mavlink/>
- mavlink与ROS的桥梁实现:<https://github.com/mavlink/mavlink-ros>
- MAVCONN轻型飞行器的通信框架:<http://pixhawk.ethz.ch/software/middleware/start>
MAVLink为微型飞行器通信提供了一套强大的工具和标准化的接口,不仅适用于硬件开发者,也适合于软件工程师进行飞行器控制系统的搭建和优化。
4. 启动图像流组件(为了看到一些更多的输出,您可以添加-v 标志):
px_imagestreamer6
5. 发起的图像流:打开 HUD 的部件,用鼠标右键单击到部件,并选择“启用实时图像流”。
你现在应该能够看到一个每秒的图像(默认情况下,目前是硬编码)视频直播。
视频流
1. 执行步骤图像流 1 至 3
2. 在你的 home 目录中创建一个符号链接:
cd6~66
ln6\s6mavconn/src/comm/video/px_videostreamer.sh6px_videostreamer.sh6
(注意:你也可以复制该文件,但不建议。)
3. 开始对 MAV 的视频流组件:
px_videostreamer6
4. 启动视频流:打开 HUD 的部件,到部件右键单击并选择“启用视频直播饲料”。
一个的 VLC 窗口现在应该打开。不要关闭窗口,只要你想要的视频流给他人!如果你想观
看当前流,只是在另一个 VLC 窗口打开流。

剩余95页未读,继续阅读
2020-07-09 上传
2017-09-26 上传
2020-03-12 上传
2024-04-08 上传
2020-03-02 上传
2019-11-01 上传
2019-11-01 上传

weixin_43985641
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- unity和安卓交互调用安卓浏览器拉起应用市场
- react_timra_type脚本
- zhengzebiaodashi,java程序源码,多商户小程序商城Java
- Epic安装程序12.1.1.zip
- myguestbook
- crox-loader:用于 webpack 的 crox 加载器
- pygerduty:用于PagerDuty的Python库
- Android *纹理压缩-与代码示例的对比研究
- 静态路由基本配置(基于eNSP)
- 云悦智企业物联网官网
- code_practice
- 安卓扫描条码demoMatrix
- 基于全局和局部曲率属性的角点检测器:强大的角点检测器适用于灰度图像以及平面曲线。-matlab开发
- hellop:DevM课程HTML项目
- task:西斯玛(Sistema gerenciador de tarefas)
- Neon New Tab-crx插件
