清扫机器人路径规划:回溯法解决室内遍历
需积分: 10 132 浏览量
更新于2024-08-12
收藏 2.94MB PDF 举报
"室内自主清扫机器人的路径规划 (2010年)"
文章主要探讨了室内自主清扫机器人在路径规划方面的问题,特别是在最大化覆盖率和最小化重复清扫率的需求下,如何有效地规划清扫路径。作者禹建丽和徐亮提出了在犁田式路径规划的基础上,结合回溯法来解决清扫机器人的路径规划问题,确保机器人能够在静态结构环境中完成室内环境的遍历,同时避开障碍物。
首先,清扫机器人的运动模型被提及,这是一个基础,用于理解机器人的移动方式和如何与环境交互。在该模型中,机器人需要具备在遇到障碍物时能够有效避障的能力。早期的研究方法通常是让机器人围绕障碍物行走一圈,但这种方法对于特定类型的障碍(如U型障碍)无法实现完全覆盖。
为了解决这一问题,论文提出了犁田式路径规划。这种规划方式能让机器人按照某种预设模式(如S形或Z形)遍历整个区域,以减少遗漏和重复。然而,犁田式路径规划可能会产生盲区,即机器人无法到达的区域。为此,研究人员引入了回溯法。回溯法是一种通过尝试所有可能解决方案并逐步撤销无效尝试的算法,它具有程序结构清晰、可读性好、易于理解和高效运行的特点。
在具体实施上,清扫机器人的环境被表示为一个栅格地图,每个格子代表环境的一部分,可以标记为无障碍空间或障碍物。通过这种全局视野,机器人能预先知道整个房间的布局和障碍物位置。接着,基于环境全局的路径规划开始,当遇到盲点时,回溯法将帮助机器人调整路径,确保没有遗漏的区域。
文章指出,尽管清扫机器人技术在国内起步较晚,但仍有很多关键问题待解决,而路径规划是其中之一。提出的回溯法策略为解决清扫机器人在遍历复杂环境时遇到的挑战提供了一种有效的解决方案。
这篇论文对室内清扫机器人的路径规划问题进行了深入研究,通过结合犁田式路径规划和回溯法,提高了清扫覆盖率和避障能力。这为未来家庭服务机器人在自主导航和环境理解方面的发展提供了理论和技术支持。
第
21
卷第
3
期
2010
年
6
月
中原工学院学报
Vol.
21
No.3
Jun.
,2010
JOURNAL
OF
ZHONGYUAN
UNIVERSITY
OF
TECHNOLOGY
文章编号
:1671--6906(2010)03
一
0001
一
03
室内自主清扫机器人的路径规划
禹建丽,徐亮
(中原工学院,郑州
450007)
摘
要:
为了满足室内清扫机器人完全覆盖路径规划中的最大覆盖率和最小重复率的要求,在清扫机器人犁回式路径
规划的基础上,提出了运用回溯法来实现清扫机器人的路径规划,最终完成室内环境的遍历.仿真结果表明,在静态结
构环境中,清扫机器人能够沿着犁回式的路径完成清扫任务,并成功地避开障碍物.
关
键词:
清扫机器人;栅格地图;完全遍历;路径规划
中图分类号
TP24
文献标识码
A
DOI:10.
3969/j.
issn.
1671--6906.
2010. 03. 001
清扫机器人是自动进行房间地面清洁的家庭服务
机器人.在
20
世纪
80
年代,
SANYO
公司就正式开始 1
清扫机器人的运动模型
进行清扫机器人的研发工作
[IJ
美国的
"Irobot"
公司、
日本的松下、日立等公司先后研发了一些样机和产品.
我国从
20
世纪
90
年代开始进行室内地面清扫机器人
的技术研究,如
2001
年浙江大学设计的第一个具有初
步智能的自主清扫机器人口飞而后哈尔滨工业大学
也进行了自主吸尘机器人的研发工作.总的来看,清扫
机器人的研究还刚刚起步,仍有许多关键技术问题需
要解决,其中路径规划就是重要的关键技术之一.文献
[4J
、
[5J
、
[6J
提出清扫机器人在遇到障碍物时绕障碍
行走一圈,并且标注障碍物的位置,然后绕过障碍继续
行走.可以看出这种路径规划对于某些障碍,如
U
型
障碍物,是不能遍历到的,为解决这种问题,本文在犁
田式路径规划的基础上,采用回溯的方法来解决清扫
过程中遇到的盲区问题.回溯法的优点在于其程序结
构明确,可读性强,易于理解,而且通过对问题的分析
可以大大提高运行效率.基于上述的分析,在全局范围
内,运用栅格地图来初始化室内环境模型,栅格地图中
分别表示了房间的大小和障碍物的分布情况,然后进
行基于环境全局的路径规划,利用回溯法来解决盲点
问题,使清扫机器人完成清扫任务.
收稿日期
:2010--04--09
基金项目:郑州市国际合作研究项目
C083sgyg25124
一
13)
作者简介:禹建丽
0960
一九女,河南洛阳人,教授,博士.
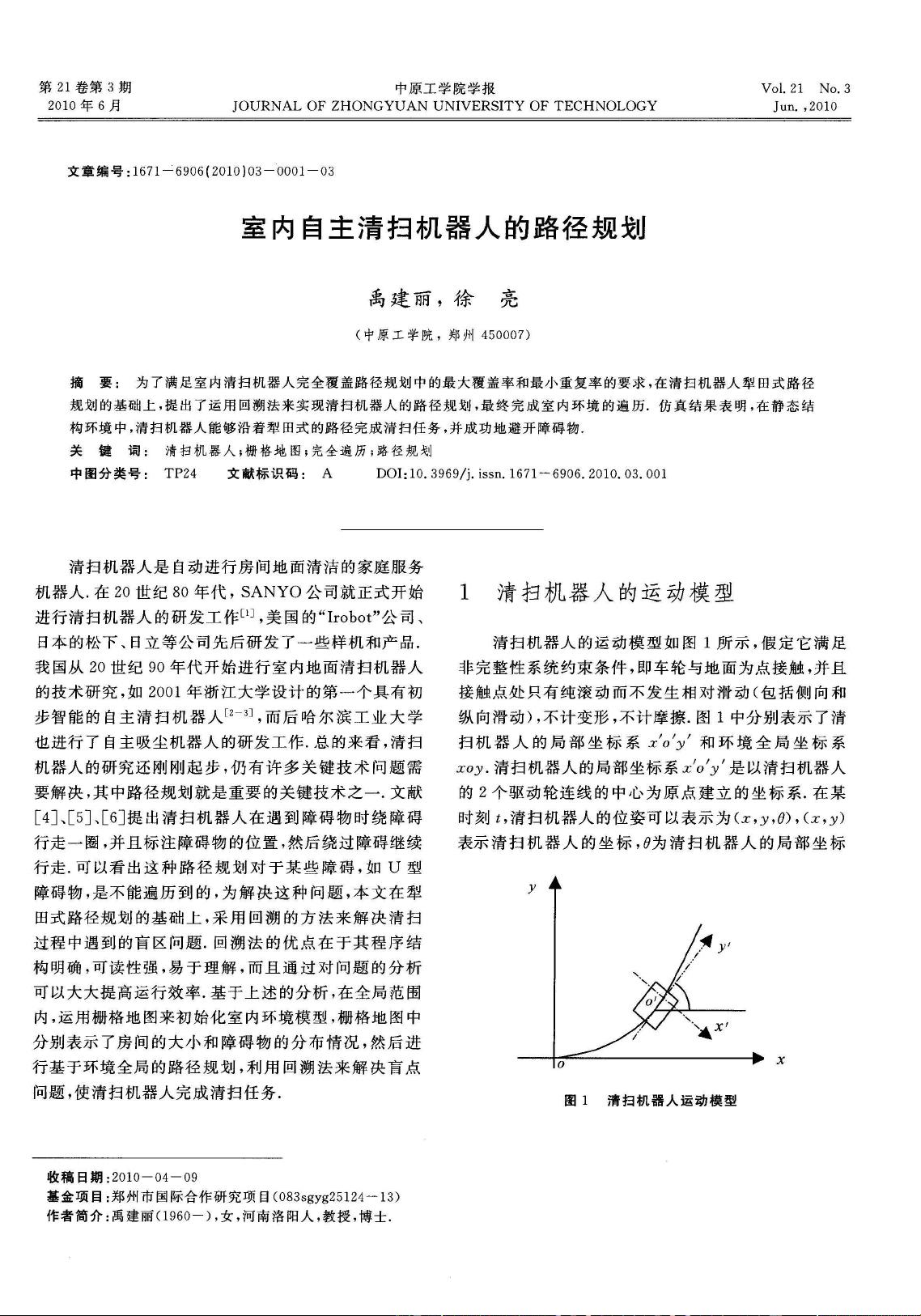
清扫机器人的运动模型如图
1
所示,假定它满足
非完整性系统约束条件,即车轮与地面为点接触,并且
接触点处只有纯滚动而不发生相对滑动(包括侧向和
纵向滑动)
,不计变形,不计摩擦.图
1
中分别表示了清
扫机器人的局部坐标系
zbr3YF:
和环境全局坐标系
xoy.
清扫机器人的局部坐标系
zbF31'
是以清扫机器人
的
2
个驱动轮连线的中心为原点建立的坐标系.在某
时刻
t
,
清扫机器人的位姿可以表示为
(x
,
川的,付
,
y)
表示清扫机器人的坐标,。为清扫机器人的局部坐标
y
。
x
图
1
清扫机器人运动模型
下载后可阅读完整内容,剩余3页未读,立即下载
2022-08-03 上传
2021-09-10 上传
2020-10-16 上传
2024-07-07 上传
2019-03-30 上传
点击了解资源详情
点击了解资源详情

weixin_38595689
- 粉丝: 4
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
