"深度传感器应用于移动机器人视觉SLAM研究"
需积分: 0 142 浏览量
更新于2024-01-20
收藏 6.47MB PDF 举报
本篇论文主要研究基于深度传感器的移动机器人视觉SLAM(Simultaneous Localization and Mapping)。SLAM是机器人研究领域的重点之一,它旨在通过同时进行定位和地图构建,使机器人能够在未知环境中自主导航和实现任务。
本文的研究目的是探索利用深度传感器进行SLAM的方法。深度传感器能够提供丰富的环境信息,包括物体的位置、形状和距离等,在SLAM中具有很大的应用潜力。因此,本文通过对深度传感器的特性进行分析,设计了一种基于深度传感器的SLAM系统,并进行了相关实验和评估。
首先,本文对深度传感器进行了综述和分析。深度传感器是一种能够实时获取环境中物体距离的设备,常见的深度传感器包括激光雷达、结构光和ToF传感器等。本文通过比较不同深度传感器的技术原理、测量精度和应用场景等方面,选择了适用于移动机器人SLAM的深度传感器。
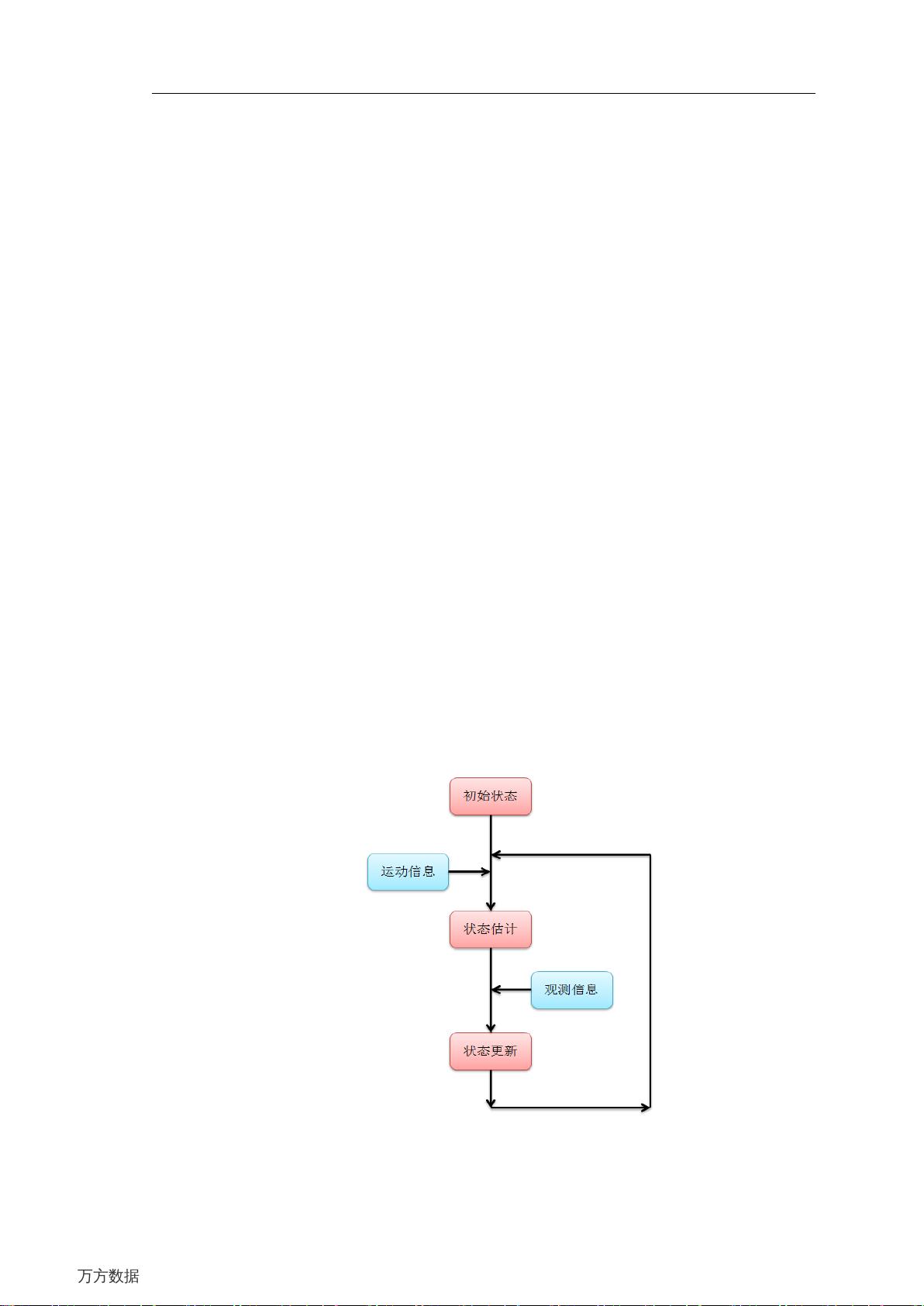
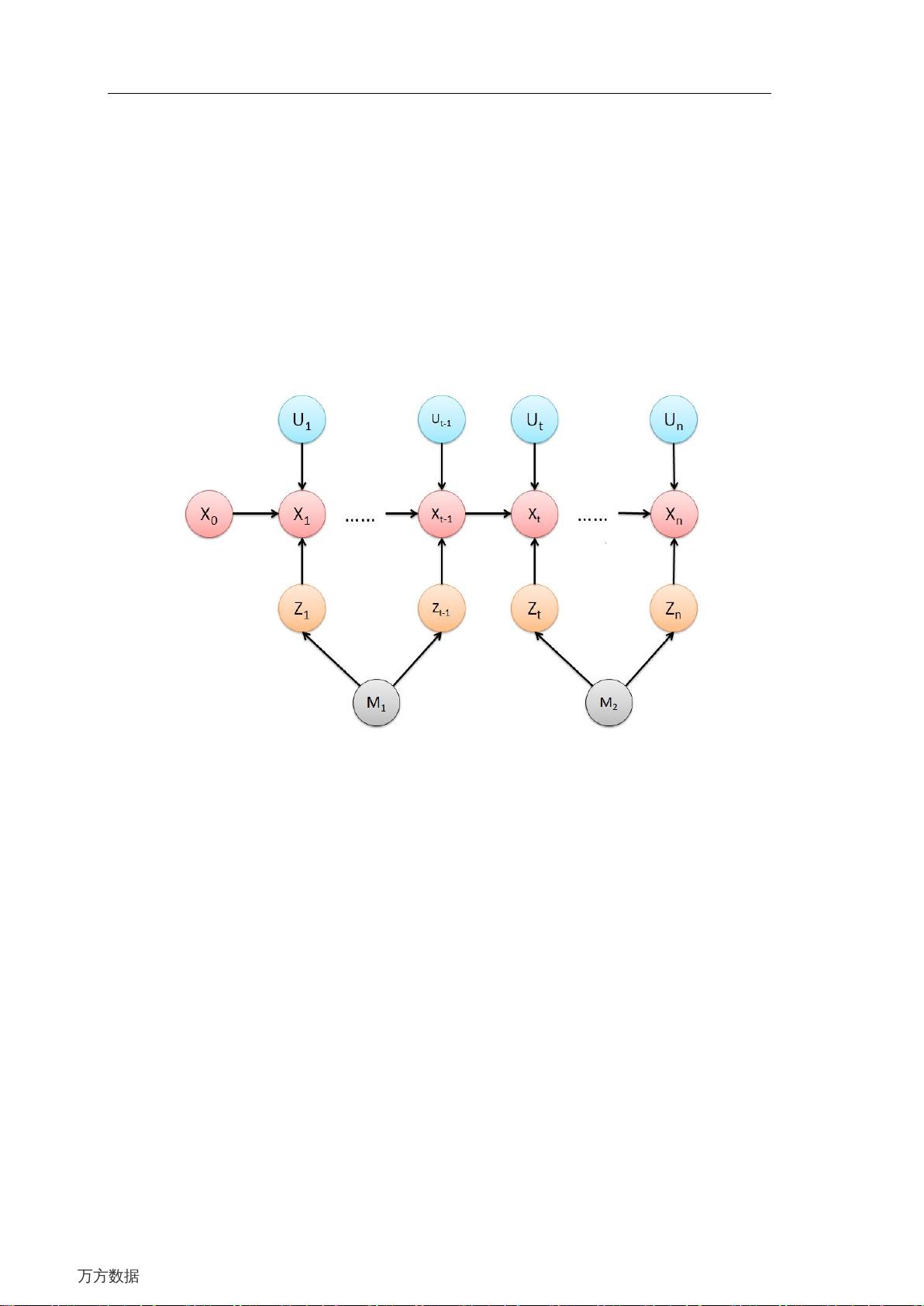
接着,本文详细介绍了基于深度传感器的移动机器人SLAM系统的设计与实现。系统由感知模块、定位模块和地图构建模块组成。感知模块通过深度传感器获取环境信息,包括障碍物和地标等。定位模块利用机器人的运动信息和环境特征进行定位和姿态估计。地图构建模块通过融合感知信息和定位信息,实时构建机器人所在环境的地图。
然后,本文对设计的SLAM系统进行了实验验证。实验采用了一台移动机器人和一个深度传感器进行数据采集和处理。通过对不同场景的测试,本文评估了系统在定位精度、地图建立效果和实时性等方面的性能。实验结果显示,基于深度传感器的SLAM系统在不同环境下都取得了较好的效果,具有较高的定位精度和地图建立能力。
最后,本文对基于深度传感器的移动机器人SLAM的应用前景进行了展望。移动机器人SLAM技术具有广泛的应用前景,包括室内导航、环境监测和智能交通等领域。基于深度传感器的SLAM系统具有较为精确和稳定的定位能力,可以在复杂环境中实现高精度的导航和定位。
综上所述,本文通过深入研究深度传感器技术,设计了一种基于深度传感器的移动机器人SLAM系统,并进行了相关实验和评估。研究结果表明,该系统具有较高的定位精度和地图建立能力,具有广阔的应用前景。
重庆大学硕士学位论文
4
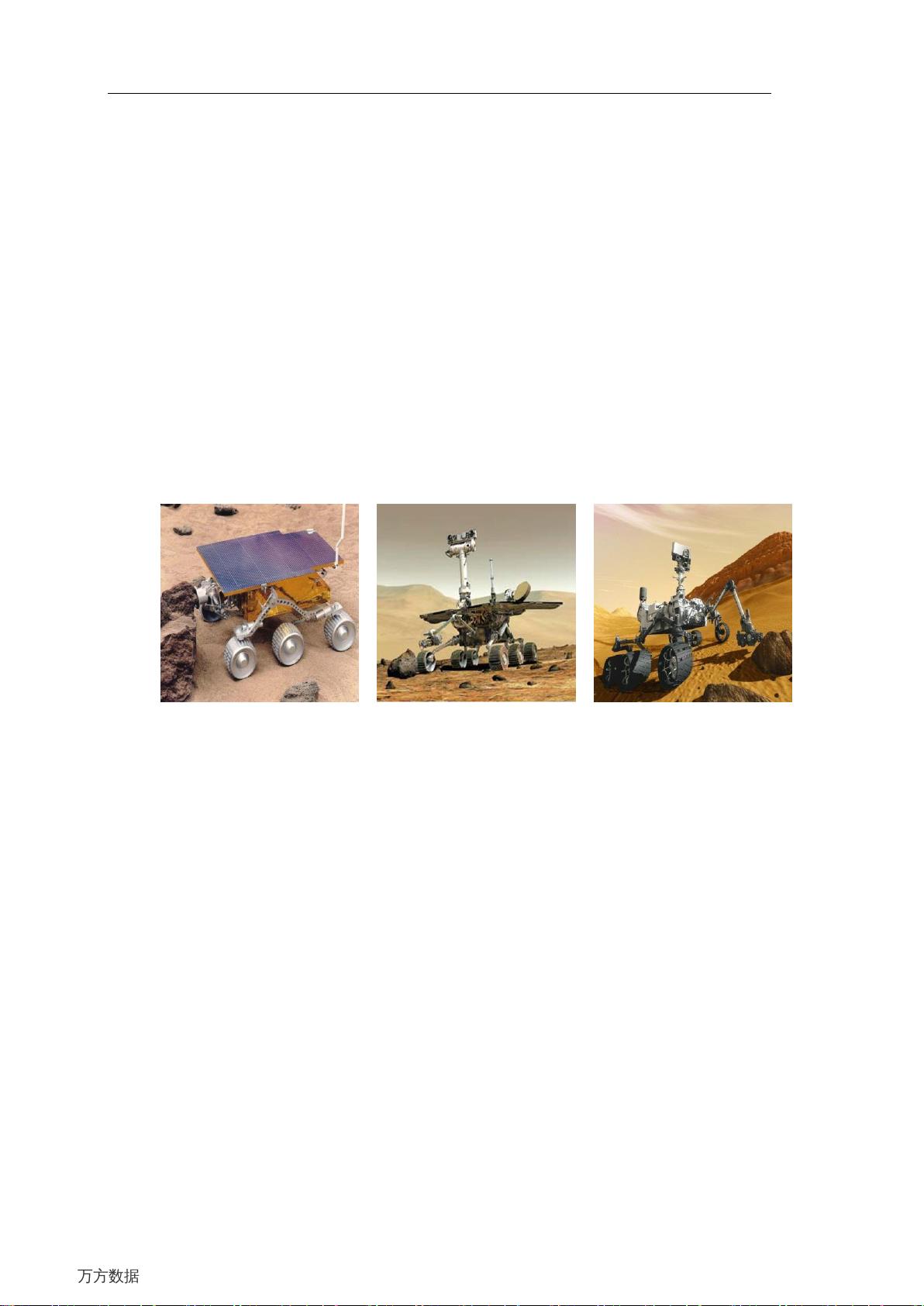
随着航天技术的发展,移动机器人有了更为广阔的应用空间与科研价值。1997
年,美国国家航空航天局(NASA)研制的火星探测机器人 Sojourner 成功于火星
登陆,拉开了人类利用移动机器人技术进行空间探测与开发的序幕
[15]
。为了在火
星上进行长距离探测,NASA 开始了对新一代样机的研制,并将其命名为 Rocky7。
该样机在 Lavic 湖的岩溶流上和干枯的湖床上成功进行了行走实验。2004 年 1 月
美国 NASA 火星探测移动机器人 Spirit 和 Opportunity 先后于火星表面顺利登陆。
Spirit 和 Opportunity 的成功着陆标志着人类发射的星际探测器自动化程度提升到
了前所未有的水平,同时也标志着智能移动机器人的研究工作达到了一个前所未
有的高度,正在为人类的进步发展贡献力量
[16]
。2012 年 8 月 6 日,美国 NASA 火
星探测移动机器人(Curiosity)再次在火星成功登陆。Curiosity 携带了分辨率更高
的探测设备,具有更强大的空间探测能力。
图 1.4 Sojourner 机器人 图 1.5 Spirit 机器人 图 1.6 Curiosity 机器人
Fig1.4 Sojourner robot Fig1.5 Spirit robot Fig1.6 Curiosity robot
此外,在其他领域,移动机器人也取得了巨大的成功。1998 年,德国研制的
轮椅机器人在汉诺威工业商品博览会的展览大厅内成功进行实地现场表演
[17]
。
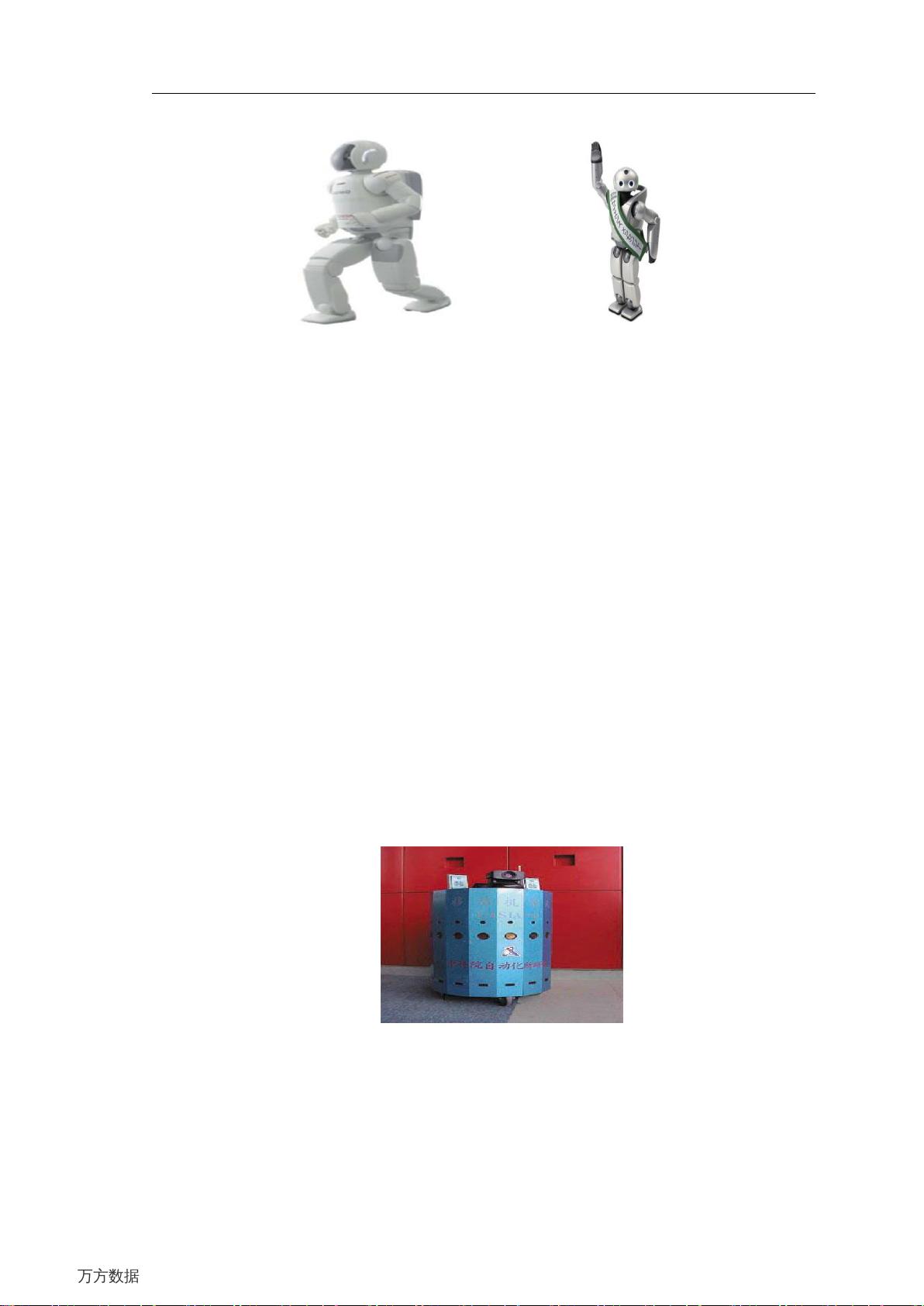
日本本田技研工业株式会社开发的 ASIMO 机器人被公认为协调能力最强的
人形机器人。该机器人不仅具备了行走功能与人体肢体动作,还具备了基本的记
忆与辨识能力
[18]
。
索尼公司推出的 QRIO 机器人通过头部两个全方位扫描的摄像头来进行环境
识别,具有强大的功能
[19]
。它高度为 58 厘米、重约 7 公斤,全身拥有 38 个可自
由转动的关节,能够惟妙惟肖地模仿人类的动作。它不仅可以唱歌、跳舞、踢足
球,甚至可以通过记录声音和脸部特征识别主人,进行高级的互动。
万方数据
剩余101页未读,继续阅读
点击了解资源详情
185 浏览量
121 浏览量
180 浏览量
2022-12-16 上传
174 浏览量
425 浏览量
150 浏览量
2022-08-04 上传

XiZi
- 粉丝: 735
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
