BP神经网络驱动的广义预测控制提升倒立摆快速系统稳定性
本文探讨了在一级倒立摆控制系统中应用基于BP神经网络的广义预测控制算法。倒立摆是一个复杂的非线性系统,对于机器人技术、卫星姿态控制和火箭姿态控制等领域具有重要意义。传统的控制方法如线性控制和预测控制虽然有效,但难以应对快速系统的实时性和复杂性。预测控制,尤其是广义预测控制,因其多步输出预测和滚动优化特性,在处理非最小相位系统和不稳定系统方面表现出色,但计算负担较大。
作者提出的新算法结合了BP神经网络的优势,简化了广义预测控制的计算过程,使其更适合快速系统的实时应用。BP神经网络作为一种强大的计算模型,能够通过学习和适应来逼近复杂的函数关系,这在预测控制中可以用来估计系统未来的动态行为。
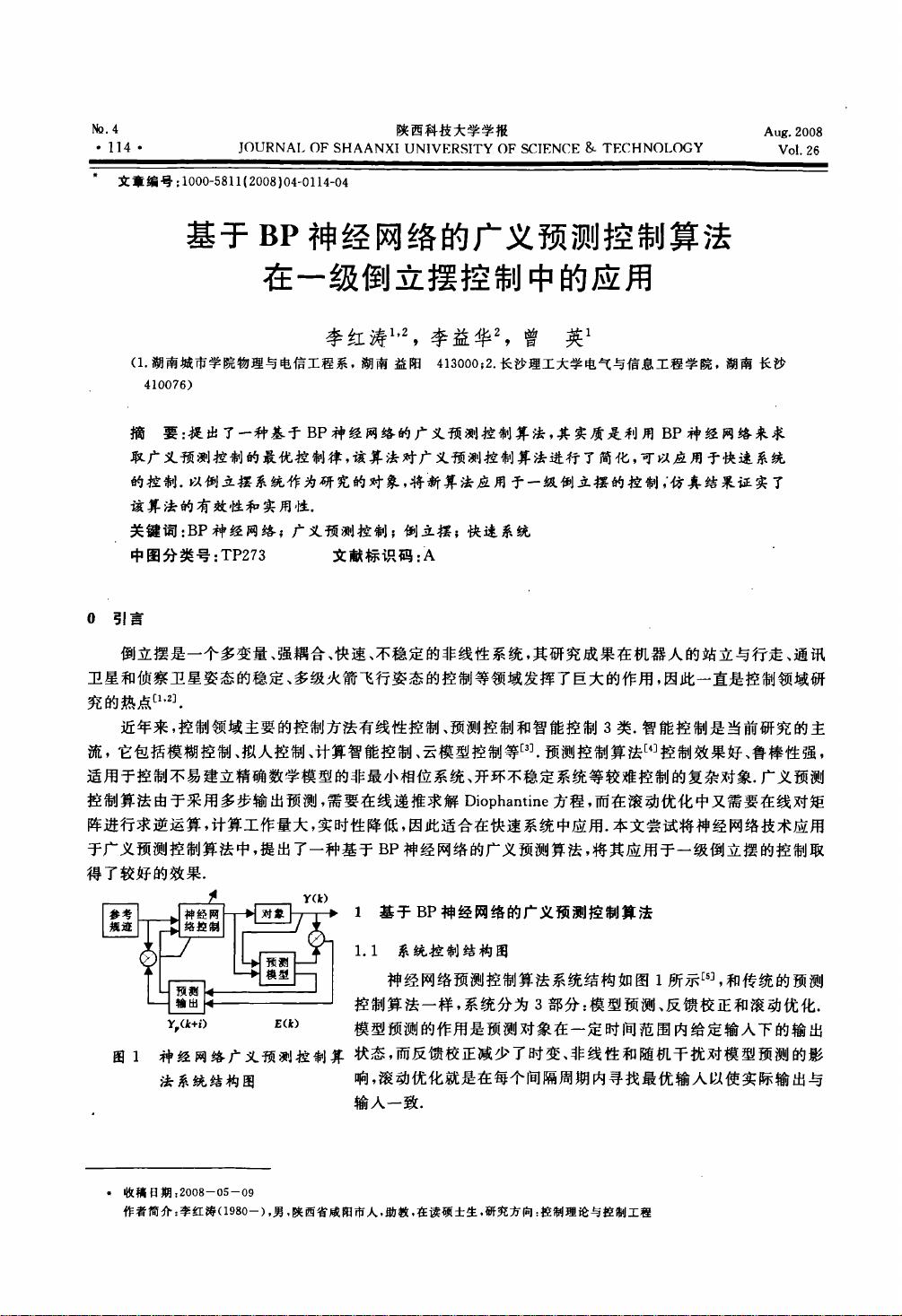
系统控制结构图显示了神经网络预测控制算法的基本框架,包括模型预测部分,用于预测未来输出;反馈校正环节,通过神经网络校正预测误差,提高控制精度;以及滚动优化模块,通过不断更新网络权重来优化控制策略。这种结构允许算法在实时环境中自我调整,提高控制的自适应性和稳定性。
在具体实验中,将该算法应用于一级倒立摆的控制,并通过仿真结果验证了其有效性和实用性。结果显示,新算法不仅提高了控制性能,还显著减少了计算负担,使得快速系统能够在实时条件下获得良好的控制效果。
总结来说,本文的研究贡献在于将神经网络技术与广义预测控制相结合,为快速且动态变化的倒立摆系统提供了一种高效、适应性强的控制策略,这对于提高这类系统的控制效率和稳定性具有实际价值。
下载后可阅读完整内容,剩余7页未读,立即下载

kcj1989
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- bocluongya
- nuxt-windicss-module::leaf_fluttering_in_wind:Windi CSS for Nuxt.js:high_voltage:
- WebSocketDemo( C#+Html源码)
- 世界最高建筑排名
- 在Windows下创建grub2 BIOS版本和UEFI版本程序
- 巴特沃斯和切比雪夫:Filtros巴特沃斯和切比雪夫
- SRefresh:加载动画、上拉、下拉刷新
- dwm:我的dwm叉子
- 店长培训的9个关键内容
- OpenCV-3.4.5-MinGW32.rar
- loan
- OpenBee-开源
- 探查器
- 婴幼儿用品店:哪些人不适合开婴儿用品店
- poll3.0:新版课调系统
- 个人消费记录软件
