STM32CubeMX F4 GPIO跑马灯开发教程:从配置到驱动实现
需积分: 34 97 浏览量
更新于2024-09-12
2
收藏 469KB PDF 举报
本资源是一份详细的STM32CubeMX F4开发指南,专注于实验02 GPIO 跑马灯项目的实施。在该教程中,作者通过一步步的指导,帮助读者理解和掌握如何使用STM32CubeMX进行基本配置、硬件连接、GPIO功能配置以及驱动程序的调用。
首先,硬件准备至关重要,需要确保将LED0连接到PF9,LED1连接到PF10,这些引脚将作为跑马灯的信号源。在STM32F407ZGTx型号的MCU上进行配置时,务必选择正确的微控制器。
在软件开发过程中,步骤1是硬件相关设置,包括识别并配置GPIO Pinout,例如将PF9和PF10设置为GPIO_Output1。接着,通过STM32CubeMX的PinConfiguration对话框,可以为GPIO定义用户标签名,如将PF10命名为DS0和DS1,并调整其工作模式和输出速度。
第3步是生成MDK-ARM项目,通过点击STM32CubeMX工具栏上的“Generatesourcecodebasedonusersettings”按钮,自动生成符合预设设置的源代码。生成的项目结构会清晰地展示给开发者。
在main.c文件的main()函数中,核心操作是通过HAL_GPIO_WritePin()函数来控制GPIO的状态,实现LED的亮灭切换。例如,调用HAL_GPIO_WritePin(GPIOF, DS0_Pin, GPIO_PIN_RESET)会关闭DS0引脚(LED0),而HAL_GPIO_WritePin(GPIOF, DS1_Pin, GPIO_PIN_SET)则打开DS1引脚(LED1)。在LED状态改变后,使用HAL_Delay(250)函数引入延时,使得LED以跑马灯的形式交替闪烁。
最后,完成所有配置和代码编写后,进入编译项目阶段,确保代码无误,然后编译生成可执行程序,以便在实际硬件上测试和运行GPIO跑马灯效果。
这份指南不仅提供了理论指导,还提供了实际操作的代码示例,对于学习和实践STM32CubeMX进行GPIO编程的开发者来说,具有很高的实用价值。
STM32CubeMX 开发指南
huarkkk@163.com
02 GPIO 跑马灯
注意:
在 01 基本配置里面的 MCU,开发板实际使用的是 STM32F407ZGTx,在配置的时候,请使
用正确的 MCU。
Step 1,硬件相关
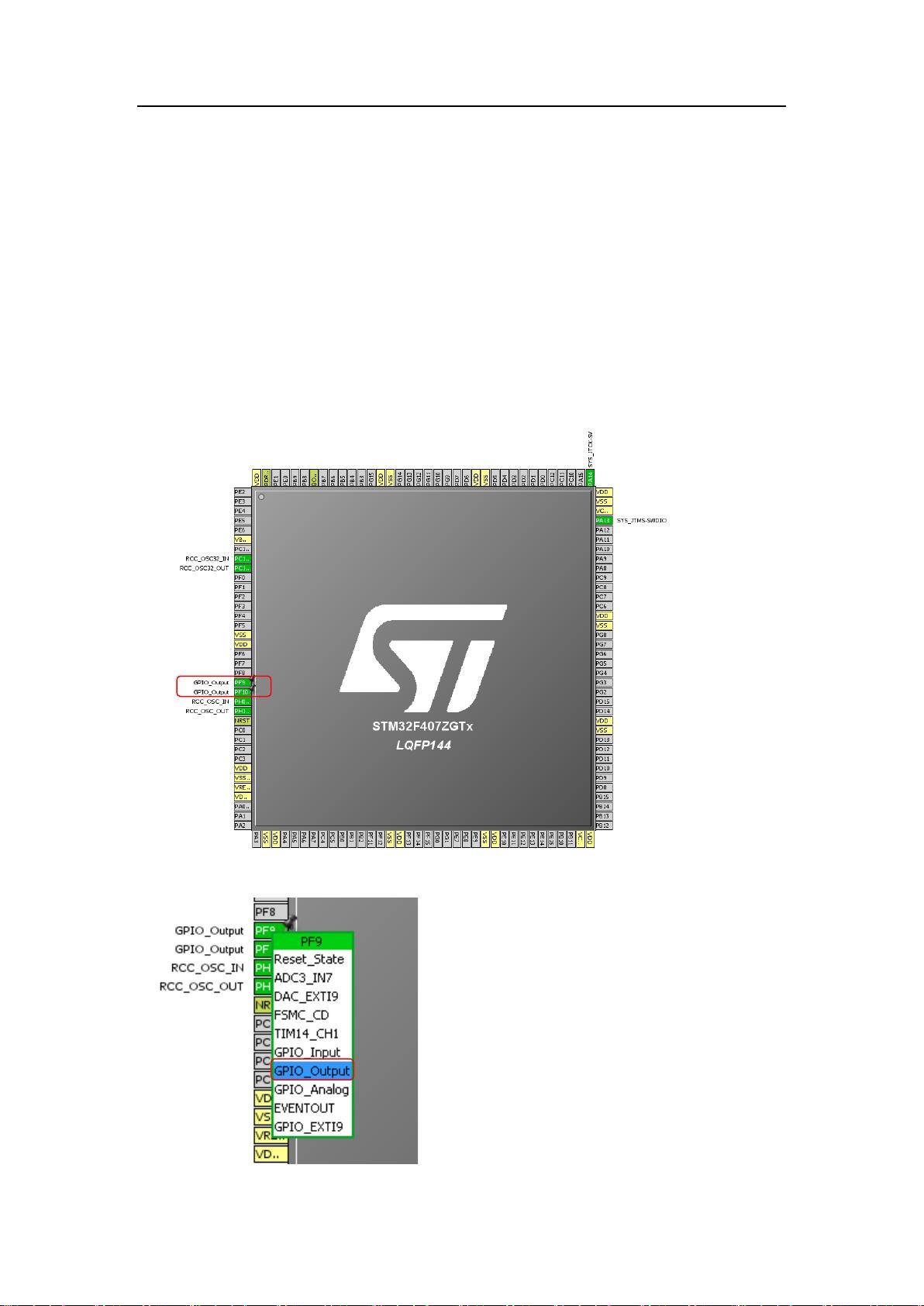
LED0 连接到 PF9, LED1 连接到 PF10。
Step 2, 选择相关 GPIO
Pinout 右侧,分别单击 PF9 和 PF10,选择 GPIO_Output
1
下载后可阅读完整内容,剩余7页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-10-18 上传
2023-06-06 上传
2021-09-30 上传
2019-03-15 上传
2024-10-27 上传
2024-10-27 上传

huarkkkk
- 粉丝: 5
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 搜索引擎--原理、技术与系统
- Hibernate开发指南
- Ajax经典案例开发大全
- GDB完全中文手册GDB调试
- JThread manual
- mapinfo用户指南
- Spring入门教程
- 7 Development Projects with the 2007 Microsoft Office System and Windows SharePoint Services 2007.pdf
- Delphi高手突破(官方版).pdf
- 中国DTMF制式来电显示国标
- 软件工程方面的学习课件参考
- IIS6缓冲区超过其配置限制
- 一种新的基于随机hough变换的椭圆检测算法
- Linux0.11内核完全注释.pdf
- eclipse 教程
- linux 18B20驱动程序
