乐高机器人巡线:浅析PID控制器的实战应用
需积分: 50 12 浏览量
更新于2024-07-16
2
收藏 95KB DOCX 举报
PID(比例-积分-微分)控制技术是工业自动化中的基石,尤其在机器人领域广泛应用,因为它能够有效地实现系统的精确控制。在乐高机器人的世界中,PID控制器的运用并非易事,对于初学者而言,它涉及高等数学和控制理论的知识,这使得许多爱好者望而却步。
J. Sluka在"A PID Controller For Lego Mindstorms Robots"这篇文章中,以易于理解的方式向缺乏专业知识的乐高机器人爱好者介绍了如何在这些机器人中实施PID控制。尽管他采用了非专业的教学方法,但这种方法对于具备一定数学基础的学习者来说仍然具有一定挑战性,特别是对于那些还在小学或初中阶段的学生,可能需要先强化基础数学知识后再尝试理解。
PID控制器的核心包括三个参数:比例(P)、积分(I)和微分(D)。比例项负责根据当前误差直接调整输出,积分项则累积过去的误差以改进长期性能,微分项则通过预测未来误差来提前调整。这三个部分协同工作,确保机器人能够快速响应并保持稳定。
在NXT-G编程环境下,作者通过实例演示如何在LEGO机器人上构建PID控制器来实现巡线任务。这种任务通常涉及使用光电传感器捕捉地面的线条,然后根据信号调整机器人行驶方向,使机器人始终沿着线条移动。更多的光电传感器可以提高巡线精度,但基本原理是相同的。
对于没有微积分背景的读者,例如参加FLL(First Lego League)比赛的学生,文章尽可能避免使用复杂的数学概念,从简单的基本结构和传感器操作开始讲解。机器人结构上,一个基本的巡线机器人由两个马达驱动车轮,前端配备垂直光电传感器,用来检测线条的存在。
学习PID巡线技术需要逐步积累,首先了解基础的机器人硬件和传感器原理,然后再逐渐引入和理解PID控制的数学概念。对于想要在这个领域深入的爱好者,系统学习微积分、控制理论和编程技巧将大有裨益。通过实践和不断调试,才能真正掌握PID在乐高机器人巡线中的应用。

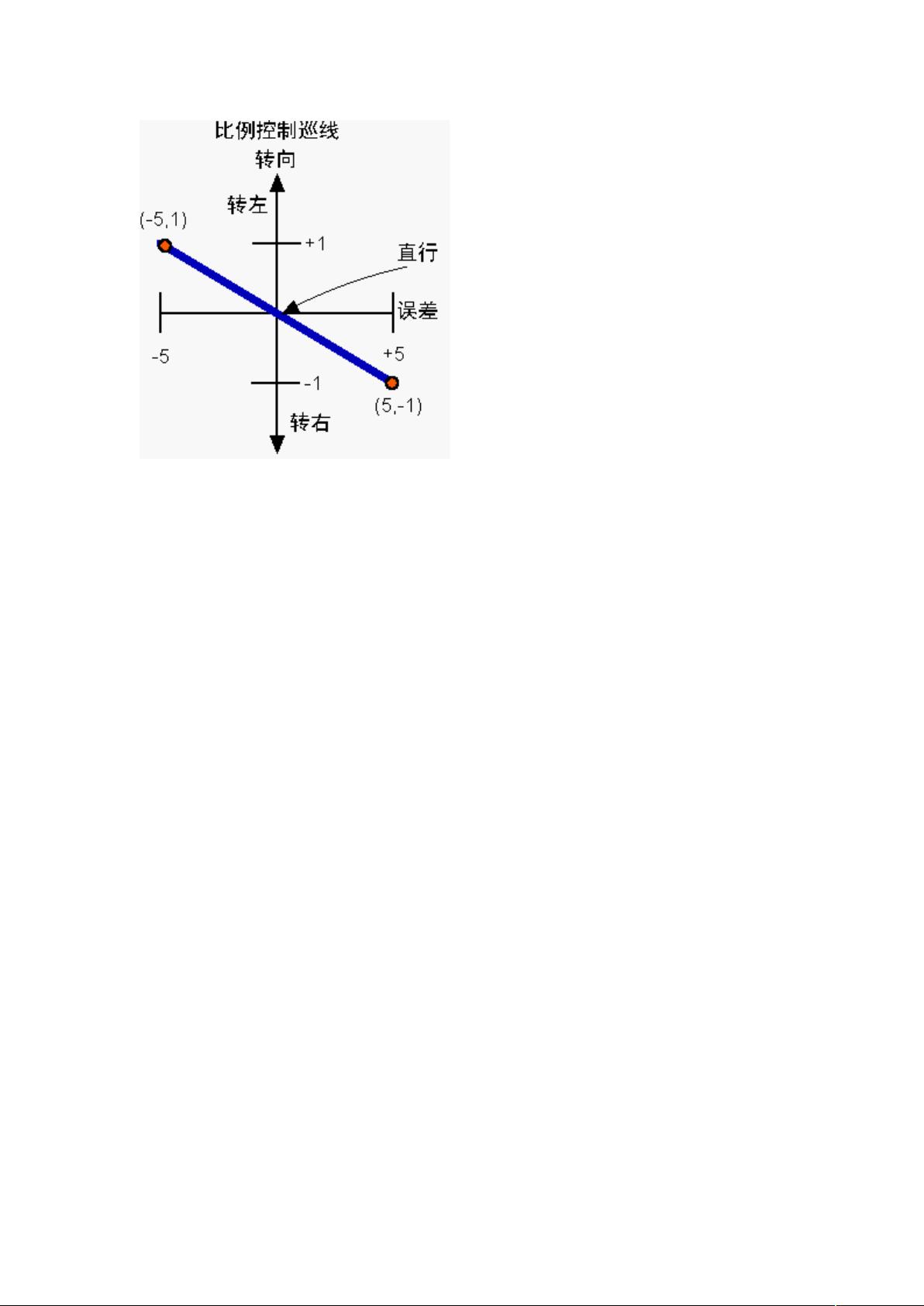
y= mx + b
这里,x,y 是指直线上任意一点的坐标值(x,y),m 是这条直
线的斜率,b 是直线在 Y 轴上的截距(当 x=0 时,直线通过 Y
轴上的点,该点在 Y 轴上的坐标值)。直线斜率的定义为直线
上任意两点 y 值的变化量除以 x 值的变化量。
我来把图形和表达式变得简单一些。首先,我们将光电传感器
读值线段(X 轴)的中心点定为 0,因为我们的光电传感器读
值范围是 40 到 50,我们把所有光电传感器读数都减掉 45(这
是 40 和 50 的平均值,(40+50)/2),得到的结果称为
“error(误差)”。当光电传感器读数为 47 时,可得到
error=47-45=2。这个 error(误差)表明了机器人的光电
传感器离线的边缘有多远。当光电传感器正好在线的边缘上,
“error(误差)”为 0(因为此时光电传感器的读值为 45,而
我们要从光电传感器读值中减掉 45)。如果光电传感器全部处
在白色的地方,“error(误差)”为 +5,如果光电传感器全部
处在黑色的地方,“error(误差)”为 -5。
剩余42页未读,继续阅读
2015-03-16 上传
2023-02-16 上传
2022-11-29 上传
2022-06-30 上传
2021-11-06 上传
2022-06-30 上传
2023-03-07 上传

L▽L
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
