FPGA驱动的六自由度智能移动机器人路径规划与遗传算法
版权申诉
190 浏览量
更新于2024-07-03
收藏 1.69MB PDF 举报
"这篇文档详细介绍了基于FPGA的六自由度智能移动机器人设计,并探讨了遗传算法在路径规划中的应用。"
在当前的科技发展背景下,FPGA(Field-Programmable Gate Array)因其可重构性和高效能,在智能硬件开发中扮演着越来越重要的角色。在六自由度智能移动机器人设计中,FPGA被用作核心处理单元,能够实时处理大量的传感器数据和执行复杂的控制算法。六自由度指的是机器人可以在三维空间中实现前后、左右、上下以及三个旋转轴的自由运动,使得机器人具有更高的灵活性和精度。
移动机器人的路径规划是一项关键技术,它涉及到机器人的自主导航能力。在有障碍物的环境中,机器人需要找到一条从起点到终点的安全路径。遗传算法是一种借鉴生物进化原理的优化方法,通过模拟自然选择、交叉和变异等过程,逐步演化出最优解。在此文中,作者提出将遗传算法应用于移动机器人的路径规划,以寻找最佳路径。
遗传算法的优势在于其全局搜索能力和适应性。通过编码个体、初始化种群、适应度函数计算、选择、交叉和变异等步骤,遗传算法可以遍历大量可能的解决方案,找到满足约束条件的最优路径。在移动机器人路径规划问题中,每个个体可以代表一种路径的编码,适应度函数则用来评估路径的安全性和效率。
结合FPGA的高速处理能力,可以实现实时的路径规划和调整。FPGA可以并行处理多个路径规划任务,大大提高了机器人的反应速度和决策效率。通过实验验证,这种基于遗传算法的路径规划方法不仅能够有效地避免碰撞,还能在复杂环境中找到最优路径,提高移动机器人的自主性和动态性能。
关键词:FPGA、六自由度、智能移动机器人、路径规划、遗传算法。这些关键概念相互关联,构成了现代智能机器人领域的重要研究方向。通过FPGA的强大计算能力结合智能算法,如遗传算法,能够在复杂环境中实现高效、安全的自主导航,对于推动智能移动机器人技术的发展具有重要意义。
器,接线复朵。容易车体震动干扰,而存在可靠 性差,故障多,维修困难等问题。可
编程控制器单片机控制的上下料机器手控制 系统动作简便,线路设计合理,具有较强
的抗干扰能力。保证了系统运行的可靠 性,降低了维修率。提高了工作效率。机器手
技术涉及到力学,单片机,自动控 制技术,传感器技术计算机技术等科学领域,是一
门跨学科综合技术。机器手是 一种能自动化定位控制并可重新编程序以变动的多功能
机器,他乂多个自山度, 可用来搬运物体以完成在各个不同环境中工作。在工资水平
较低的中国,分拣行 业尽管仍属于劳动密集型,机器手的使用已经越来越普及,那些
电子和汽车业的 奥美跨国公司很早就在它们设在中国的工厂中引进了自动化生产。但
现在的变化 时那些分布在工业密集的华南,华东沿海地区也开始对机器手表现出越来
越浓用 的兴趣,因为他们要面对工人流失率高,以及交带来的挑战。随我国工业生产
的 E 跃发展,自动化程度的迅速提高,实现工件的装卸,转向,输送或分拣流程越来
越节约劳动力,可见机器手的大力发展有着很重要的意义。
3
、系统结构
3.1
控制系统
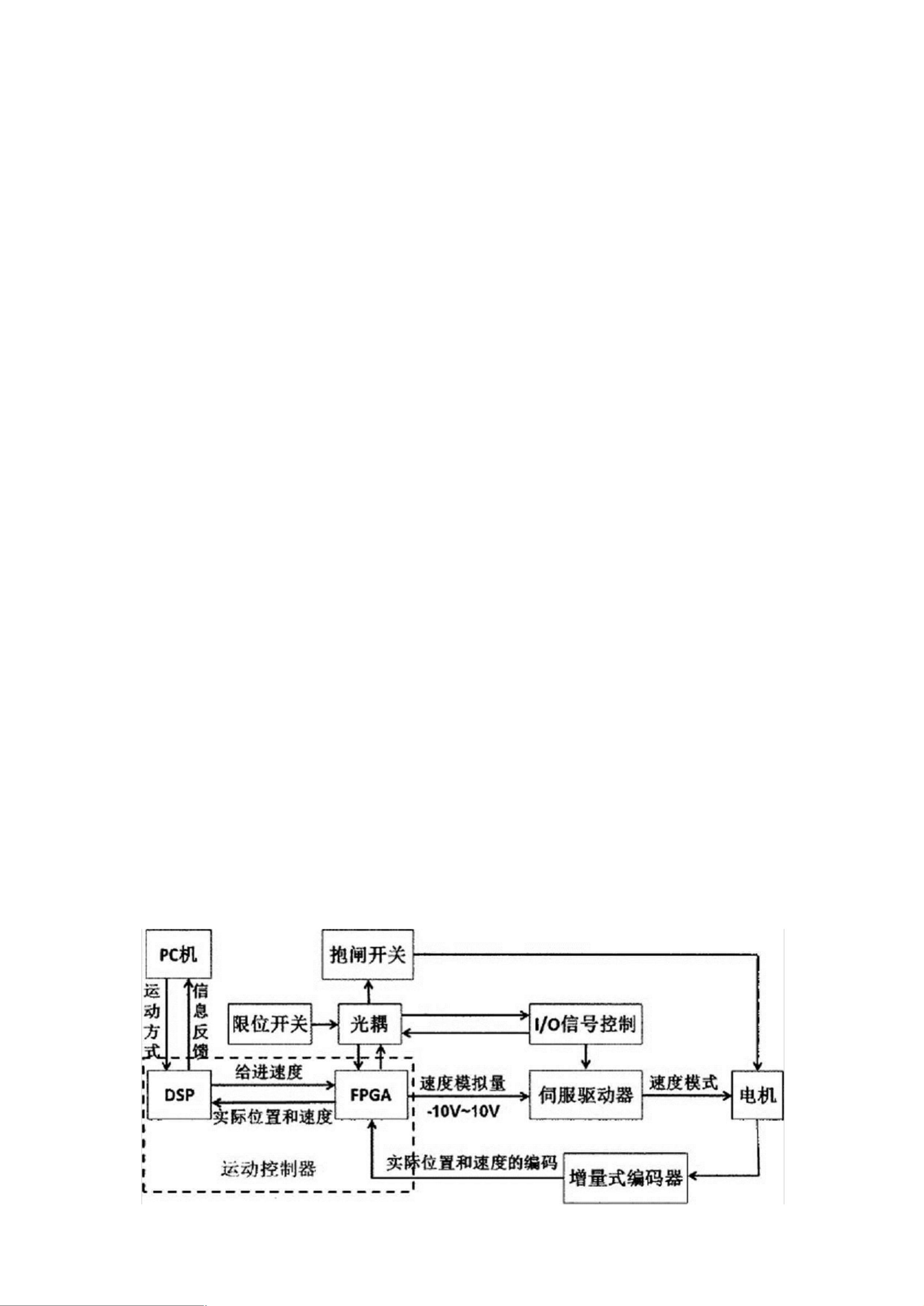
基于上述分析,本课题的六自由度工业机器人采用基于 DSP 和 FPGA 的架构模
式。DSP 是一种独特的可编程处理器、,可是实时、快速地实现各种复杂的数自 信号
处理。除了具备通用微处理器的高速运算和控制功能外,针对高速数据传输、 密集数
据运算、实时数据处理等需求,在处理器结构、指记系统的指令流程等都 有专门的设
计,为六自山度工业机器人复杂的运动控制算法捉供了可行的硬件保 障。本课题所使
用的 DSP 芯片是 IT 公司的 TMS320F2812 芯片,这款芯片一直是运 动控制的首选芯
片,既具备数字信号处理器强大的数据处理能力,乂像单片机一 样带有丰富的外设资
源和扩展接口,其外部扩展接口 XINTF 可以与 FPGA 很好地是 实现并行通信。
剩余21页未读,继续阅读
2022-06-13 上传
2021-07-13 上传
2021-07-13 上传
2021-07-13 上传
2021-07-13 上传
2021-07-13 上传
2021-07-13 上传
2021-08-14 上传

G11176593
- 粉丝: 6874
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
