自动控制原理课程设计及 MATLAB 仿真实验探究系统动态特性和控制调节技术
下载需积分: 0 | PDF格式 | 3.37MB |
更新于2024-03-24
| 55 浏览量 | 举报
3、根据(1)得到的传递函数,给出系统的分子和分母多项式;
在 MATLAB 中,可以使用以下命令将传递函数表述为分子和分母多项式形式:
[num, den] = tfdata(G);
num = num{1}; den = den{1};
4、将传递函数表述为零极点形式,并绘制系统零极点分布图;
利用 MATLAB 中的 roots 和 pzmap 函数可以将传递函数表示为零极点形式,并绘制零极点分布图:
zeros = roots(num); poles = roots(den);
pzmap(G);
5、求取系统的单位阶跃响应曲线、单位脉冲响应曲线以及输出信号响应曲线;
可以使用 MATLAB 的 step、impulse 和lsim 函数来计算系统的单位阶跃响应曲线、单位脉冲响应曲线以及给定输入信号的响应曲线:
step(G);
impulse(G);
t = 0:0.01:10;
u = sin(2*pi*t);
lsim(G, u, t);
实验二、典型环节的 MATLAB 仿真一、实验目的1、通过 MATLAB 仿真观察比例环节和积分环节对单位阶跃输入的响应。
二、实验内容1、建立比例环节和积分环节的 simulink 模型;2、记录并分析比例环节和积分环节对单位阶跃输入的响应曲线。
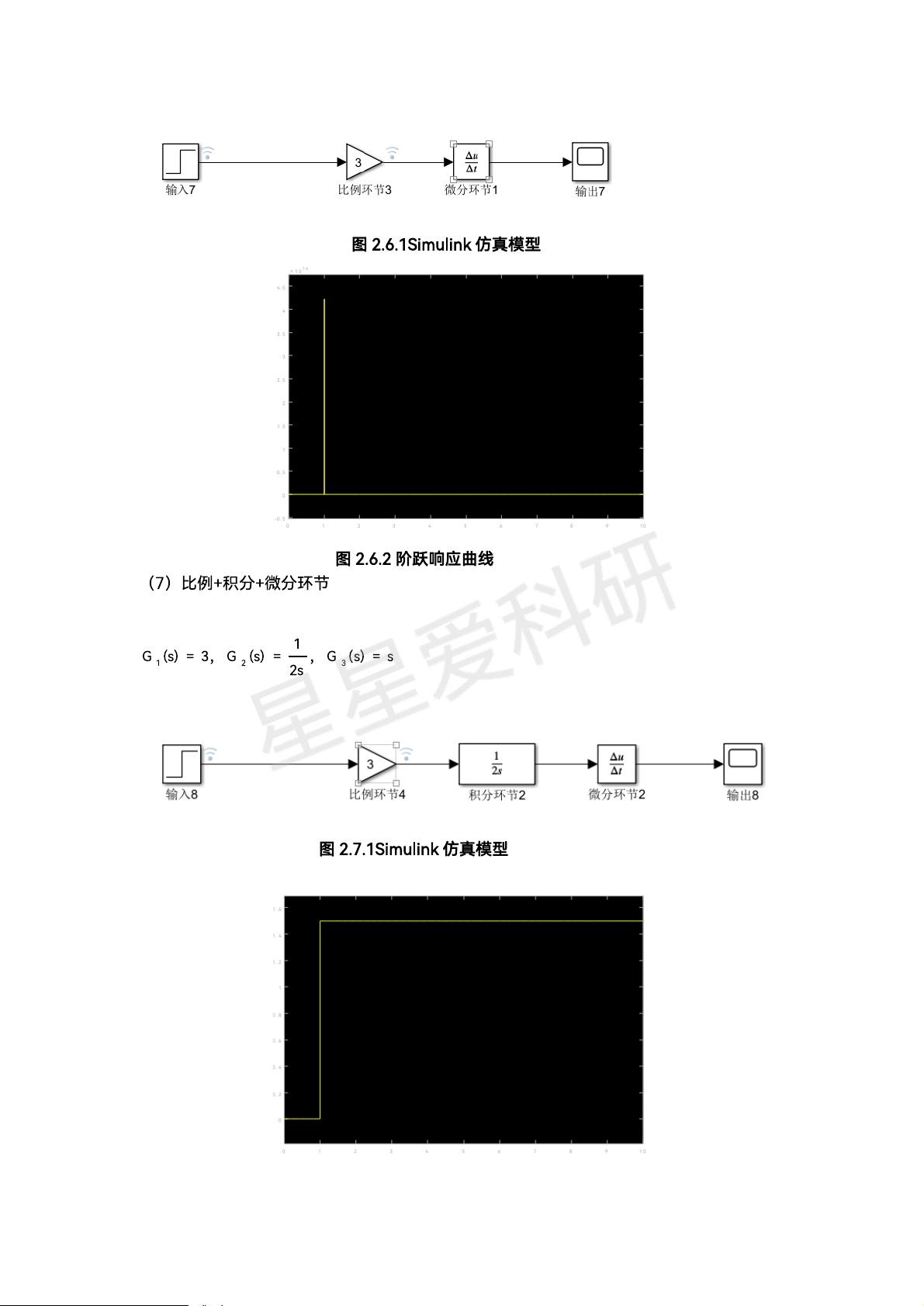
比例环节的传递函数为 G1=K1,积分环节的传递函数为 G2=K2/s。
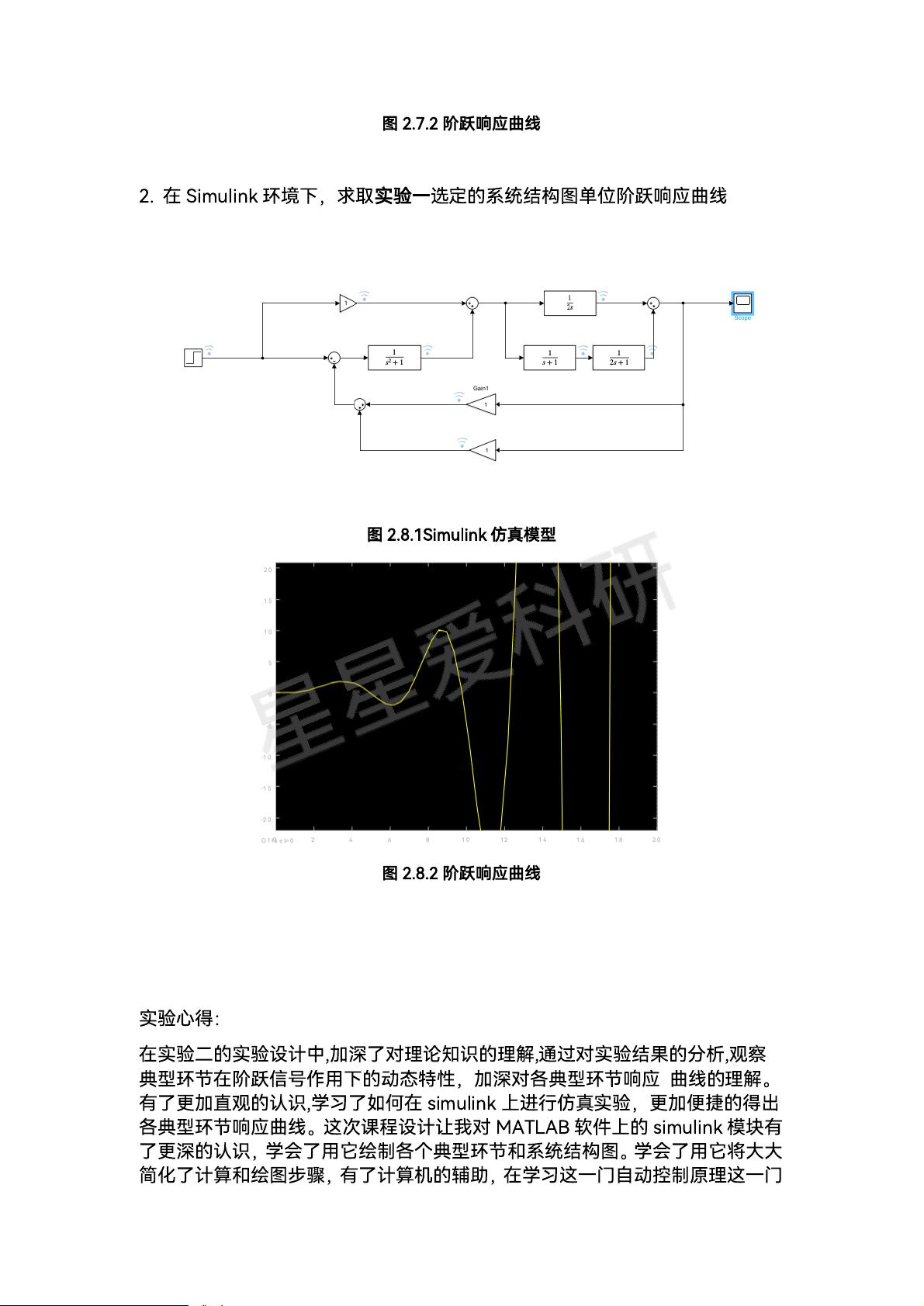
在 simulink 中可以利用比例积分环节模块建立相应的模型,并通过仿真得到单位阶跃输入下的响应曲线。
实验三、控制系统的时域分析
实验四、根轨迹分析
实验五、控制系统的频率分析
实验六、系统校正设计:测速反馈校正和比例微分校正
实验七、线性系统串联校正
实验八、PID 控制器
实验设计中涉及了系统的数学建模、传递函数求解、零极点分布图绘制、响应曲线分析等内容。通过 MATLAB 仿真,不仅可以加深对自动控制原理的理解,还可以更直观地观察和分析控制系统的动态特性。同时,根据不同实验内容,学习者还能够了解控制系统的时域特性、根轨迹分析、频率特性以及系统校正设计等方面的知识。在 PID 控制器实验中,学习者还可以深入了解 PID 控制器的原理和应用。综上所述,自动控制原理课程设计中的各个实验都具有一定的教育意义和实用价值,能够帮助学习者深入理解控制理论,提高自动控制系统设计和分析的能力。

相关推荐







星星爱科研
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- XXL-EXCEL:Java对象与Excel间的快速转换工具
- GNU glibc-libidn-2.5.1软件包功能解析
- 建筑风机水泵控制器的创新设计与应用
- Python实现Julia集可视化教程
- 探索JavaScript中的语言集成查询:LinqBox使用教程
- Android 2D桌球游戏源码分享:良心系列
- noGo: 一款跨平台的SGF棋谱查看与编辑工具
- LabVIEW实现UDP通信演示教程
- 2021年官方发布EasyCAP视频采集卡驱动安装指南
- 建筑物外表面风压测量技术与方法研究
- dtree:二叉树可视化工具源码解析
- GNU glibc-libidn-2.10.1压缩包深入解析
- 利用EasySP简化Android SharedPreferences代码生成
- RGB点阵版贪吃蛇游戏制作教程及源码分享
- Unity3D结合SteamVR实现Vive瞬移功能教程
- Kotlin开发的NotesApp应用设计与实现
