MATLAB实现PID参数调节:原理、仿真与实例
97 浏览量
更新于2024-09-01
1
收藏 424KB PDF 举报
本文主要探讨了基于MATLAB的PID控制系统参数调节方案,针对实际工程中PID控制的广泛应用和优势,如结构简单、调整便捷、稳定性强和工作可靠性高。PID控制系统是一种常用的控制策略,尤其在没有完整对象模型或精确数学模型的情况下,它能通过比例(P)、积分(I)、微分(D)等控制规律实现有效调节。
PID控制器的基本原理是根据设定值r(t)和实际输出值y(t)之间的误差e(t),利用Kp、Ti和Td这三个关键参数来构建控制策略。控制器的输出作为被控对象的输入,其传递函数表达式体现了这三种控制作用的组合。MATLAB作为一种强大的数值计算和可视化工具,因其易用性和灵活性在PID控制器的设计与仿真中发挥了重要作用。
本文首先介绍了PID控制的原理和算法,强调了MATLAB在建模和仿真中的地位。作者通过MATLAB的Simulink工具,以图形化方式搭建仿真系统模型,具体步骤包括建立被控对象的等效传递函数数学模型,然后将这个模型转换为Simulink可执行的形式,从而进行实时的仿真分析。
在仿真实例分析部分,文章展示了如何通过Simulink将理论模型转化为计算机可操作的模型,比如设置被控对象的动态特性,并通过设定不同的PID参数,观察并分析控制效果。通过仿真结果,工程师可以直观地评估不同参数组合对系统性能的影响,从而优化PID控制器的参数,以满足特定的工业控制需求。
这篇文章提供了实用的方法论,帮助工程师理解和掌握如何利用MATLAB进行PID控制系统的参数调节,以提升实际工程中的控制性能和效率。
基于基于MATLAB的的PID控制系统参数调节方案控制系统参数调节方案
实际工程中由于PID 控制多重应用型优点(如,结构简单、调整方便、稳定性好、工作可靠等),因此它还是
应用最广泛的调节器控制规律,或是基于基本PID 控制的各种改进型PID 控制。
导读:实际工程中由于导读:实际工程中由于PID 控制多重应用型优点(如,结构简单、调整方便、稳定性好、工作可靠等),因此它还是应用最广控制多重应用型优点(如,结构简单、调整方便、稳定性好、工作可靠等),因此它还是应用最广
泛的调节器控制规律,或是基于基本泛的调节器控制规律,或是基于基本PID 控制的各种改进型控制的各种改进型PID 控制。控制。
1. PID 控制系统原理及算法控制系统原理及算法
当我们不能将被控对象的结构和参数完全地掌握,或者是不能得到精确的数学模型时,在这种情况下最便捷的方法便是采用
PID 控制技术。为了使控制系统满足性能指标要求,PID 控制器一般地是依据设定值与实际值的误差,利用比例(P)、积分
(I)、微分(D)等基本控制规律,或者是三者进行适当地配合形成相关的复合控制规律,例如,PD、PI、PID 等。
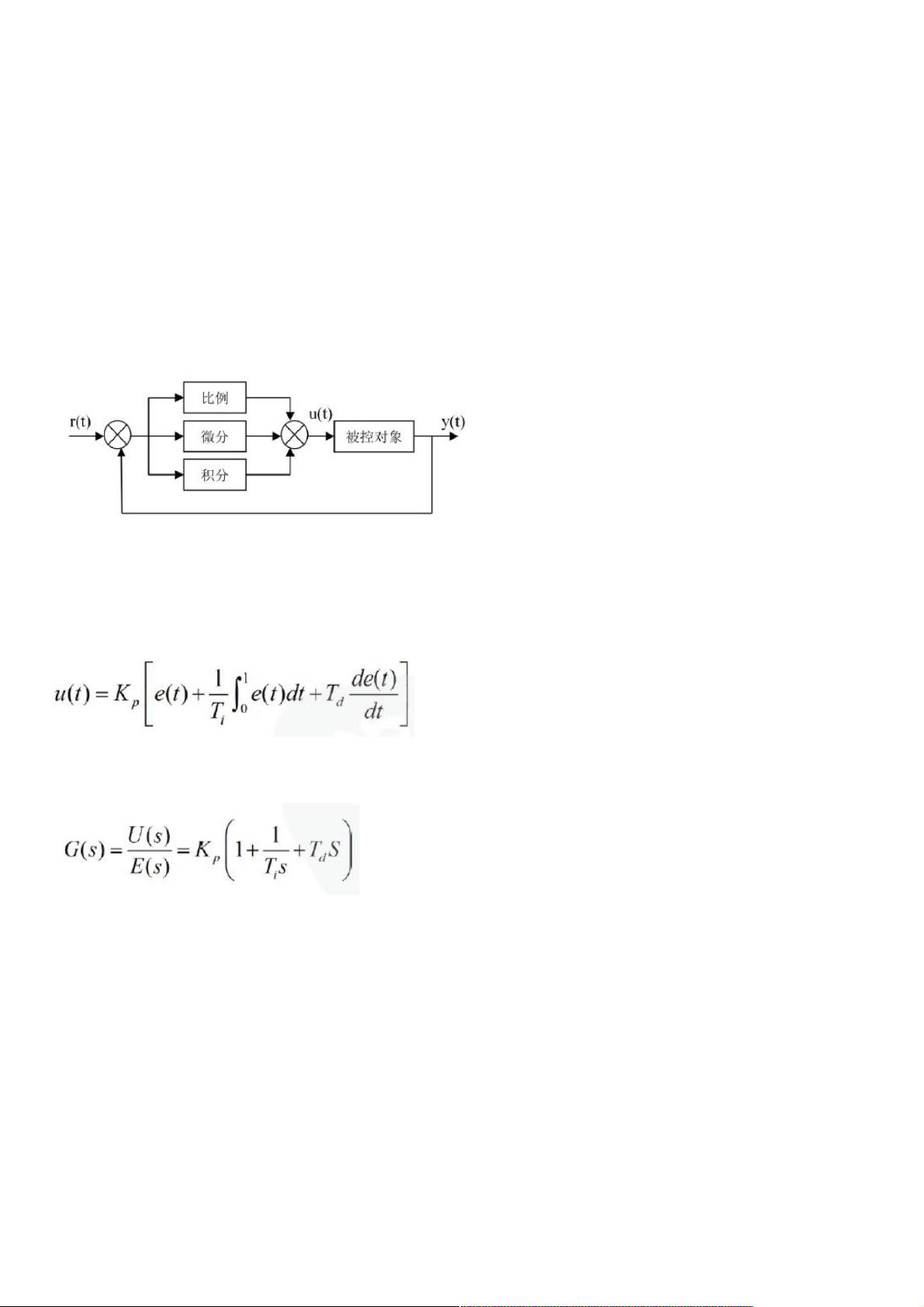
图1 是典型PID 控制系统结构图。在PID 调节器作用下,对误差信号分别进行比例、积分、微分组合控制。调节器的输出量作
为被控对象的输入控制量。
图1 典型PID控制系统结构图
PID 控制器主要是依据给定值r(t)与实际输出值y(t)构成控制偏差,用公式表示即e(t)=r(t)-y(t),它本身属于一种
线性控制器。通过线性组合偏差的比例(P)、积分(I)、微分(D),将三者构成控制量,进而控制受控对象。控制规律如
下:
其传递函数为:
式中:Kp--比例系数; Ti--积分时间常数; Td--微分时间常数。
2. PID 控制器的控制器的MATLAB 仿真仿真
美国MathWorks 公司推出的MATLAB 是一套具备高性能的数值计算和可视化软件。由于MATLAB 可以将矩阵运算、图形显
示、信号处理以及数值分析集于一体,构造出的用户环境使用方便、界面友好,因此MATLAB 受到众多科研工作者的欢迎。
本文利用MATLAB 仿真工具箱Simulink 的功能,在基于仿真环境Matlab/Simulink 工具上用图形化方法直接建立仿真系统模
型,启动仿真过程,将结果在示波器上显示出来。
3. 仿真实例分析仿真实例分析
3.1 建立数学建模
设被控对象等效传递函数为
下载后可阅读完整内容,剩余3页未读,立即下载
226 浏览量
基于SIMULINK仿真环境的双容水箱恒水位控制系统分析与设计,PID与串级控制系统方案比较及参数优化,基于Simulink和MATLAB的双容水箱恒水位PID控制及参数优化研究,双容水箱恒水位控制系
2025-02-23 上传
2022-05-31 上传
3818 浏览量
126 浏览量
156 浏览量
2021-07-03 上传

weixin_38748580
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
