动态环境中基于全卷积网络的语义SLAM算法提升
版权申诉
118 浏览量
更新于2024-06-29
收藏 777KB DOCX 举报
动态环境下的语义SLAM算法.docx是一篇探讨在复杂且不断变化的环境中,如何提高机器人自主导航和交互能力的关键文档。主要内容聚焦于3D语义地图在机器人技术中的重要性,特别是在自动驾驶和避障任务中的应用。SLAM(同时定位与建图)技术在此过程中扮演着核心角色,它要求机器人不仅能构建出三维几何地图,还需识别并理解场景中的物体和行为。
文章指出,传统的SLAM方法如ORB-SLAM和DSO虽然在静态环境中表现出色,但在动态环境中,由于假设场景是静态的,它们对动态对象的处理不足,这会导致特征点跟踪的不准确,从而影响定位和建图的精度。为解决这个问题,文中引入了深度学习特别是CNN(卷积神经网络)在语义分割任务中的应用。CNN,如Deeplab系列,利用反卷积层、金字塔结构和多尺度特征融合,提升了图像语义分割的精度和速度,如MobileNets优化了实时性能,而Deeplab-v3+则在保持精度的同时降低了运行时间。
然而,这些深度学习模型在防止过拟合的同时,可能会牺牲边界信息,导致边缘分割质量下降。为此,作者提出了结合全卷积网络和超像素分割的条件随机场算法。通过超像素分割技术,先将图像划分为更小、更易于处理的区域,然后将粗略的语义分割结果与超像素边缘细节信息结合起来,从而优化物体边界的语义分割,提高了整体的精度和鲁棒性。
这篇文档深入探讨了动态环境下如何通过整合语义分割与SLAM算法,克服传统方法的局限,提升机器人的感知和决策能力,为自动驾驶和机器人导航在动态世界中的高效运作提供了新的解决方案。
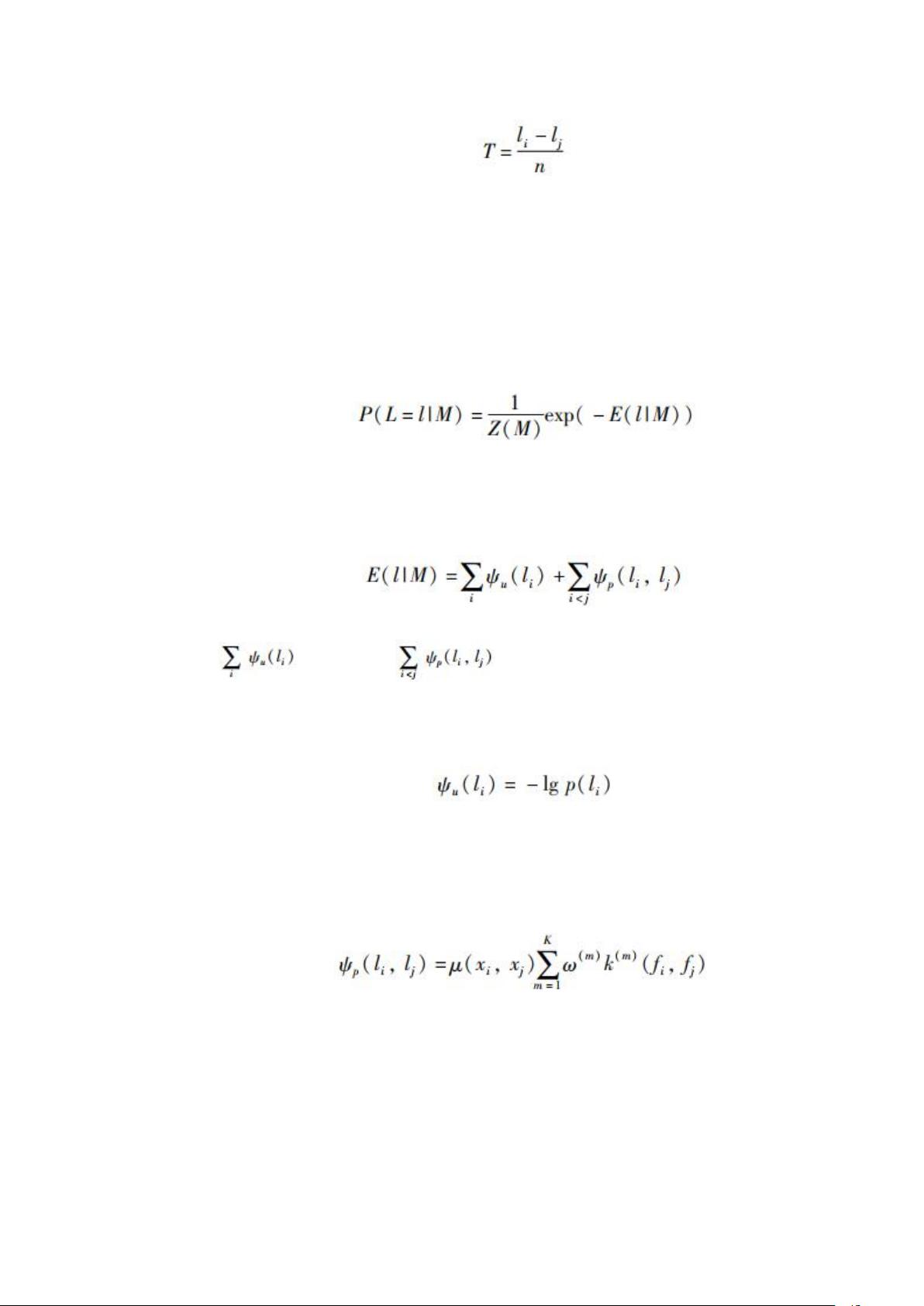
(2)
其中,l
i
-l
j
表示两类标签对应的像素点个数的差,n 表示一个超像素中所包含的像素个数.若 T 大于阈
值 0.2,则将超像素的标签设为最大值所对应的标签.如果 T 不大于阈值 0.2,则不对其语义进行重新标
注,保留语义粗分割结果.
整个语义分割系统类别标签为 L={l
1
,l
2
,…,l
K
}.条件随机场符合吉布斯分布,因此根据吉布斯分
布,元组(P,L)存在以下关系
(3)
其中,M 为随机场中的节点对应于图像中的像素点,E(l)为吉布斯能量函数,Z(M)是归一化因子,
称为分割函数.全连接条件随机场的能量函数由一元势函数和二元是函数组成,如下式所示:
(4)
其中, 为一元势函数, 为二元势函数.其中一元势函数以超像素语义重
分割的输出为基础,将其定义为该像素点所属标签概率分布的负对数,如式(5)所示,如果该像素点所对
应标签的概率越大,则对应的一元势函数值越小.
(5)
其中二元势函数由两个高斯核函数组成,在像素点与像素点之间地建立约束关系,促使具有相似特
征的像素被标注为同一个标签,而相差较大的像素标注为不同标签,而这个相似的定义由像素点的颜色和
位置信息组成,如式(6)所示.
(6)
其中,ω
(m)
为权重值,k
(m)
(f
i
,f
j
)为两个高斯核函数由像素的位置和颜色信息构成.
剩余16页未读,继续阅读
2022-05-26 上传
2021-10-29 上传
2022-07-13 上传
2022-07-13 上传
2023-02-23 上传
2022-11-19 上传









