Adams与Matlab联合仿真教程:PID控制器解析
181 浏览量
更新于2024-08-04
收藏 459KB DOC 举报
"这篇文档是关于ADAMS与MATLAB联合仿真的实例教程,基于李增刚的《adams入门详解与实例》和另一份PDF资料。文档作者通过一个具体的例子,解释了如何在ADAMS中设置PID控制器进行联合仿真,并强调了在积分环节中要注意的角度与角速度的区别。文中提到了PID控制器的三个组成部分——比例(P)、积分(I)和微分(D),并展示了如何在ADAMS模型中配置这些组件。作者特别指出,积分是对角度angle进行,而非角速度。此外,还提到某些模块如数据发送到MATLAB workspace并非必要,但可以用于对比和观察。最后,文档给出了设置单位的步骤,以确保模型的物理量单位一致性。"
在这个ADAMS与MATLAB联合仿真的例子中,重点知识包括:
1. **PID控制器**:PID控制器是一种常见的自动控制系统,由比例(P)、积分(I)和微分(D)三部分组成。比例项响应系统的当前误差,积分项考虑了过去的误差累积,微分项预测未来的误差趋势。在ADAMS模型中,这三个部分被用来设计反馈控制策略。
2. **角度与角速度的区别**:积分环节的处理是关键,积分是对角度angle进行,而不是角速度。这是因为角度是位置,而角速度是其变化率。错误地对角速度积分可能会导致仿真结果的不准确。
3. **ADAMS中的模型设置**:在开始仿真之前,需要在ADAMS/View中设置模型的物理量单位,如长度和力,确保模型的一致性。这可以通过选择菜单栏的【Settings】→【Units】命令完成。
4. **数据交换**:ADAMS模型中的数据可以通过特定模块传递到MATLAB的工作空间,便于分析和可视化。例如,角度值和时间可以通过特定模块送入MATLAB。
5. **非必要模块**:某些模块,如将数据送到MATLAB workspace的模块,虽然不是仿真必需的,但它们可以帮助理解系统动态和比较不同仿真结果。
6. **软件版本**:此教程使用的软件版本是ADAMS2012和MATLAB7.12.0 (R2011a),用户在使用其他版本时可能需要根据差异进行适配。
通过这样的实例,读者可以了解如何在ADAMS环境中配置和运行PID控制器,以及如何与MATLAB协同进行仿真,这对于机械系统动态分析和控制设计至关重要。
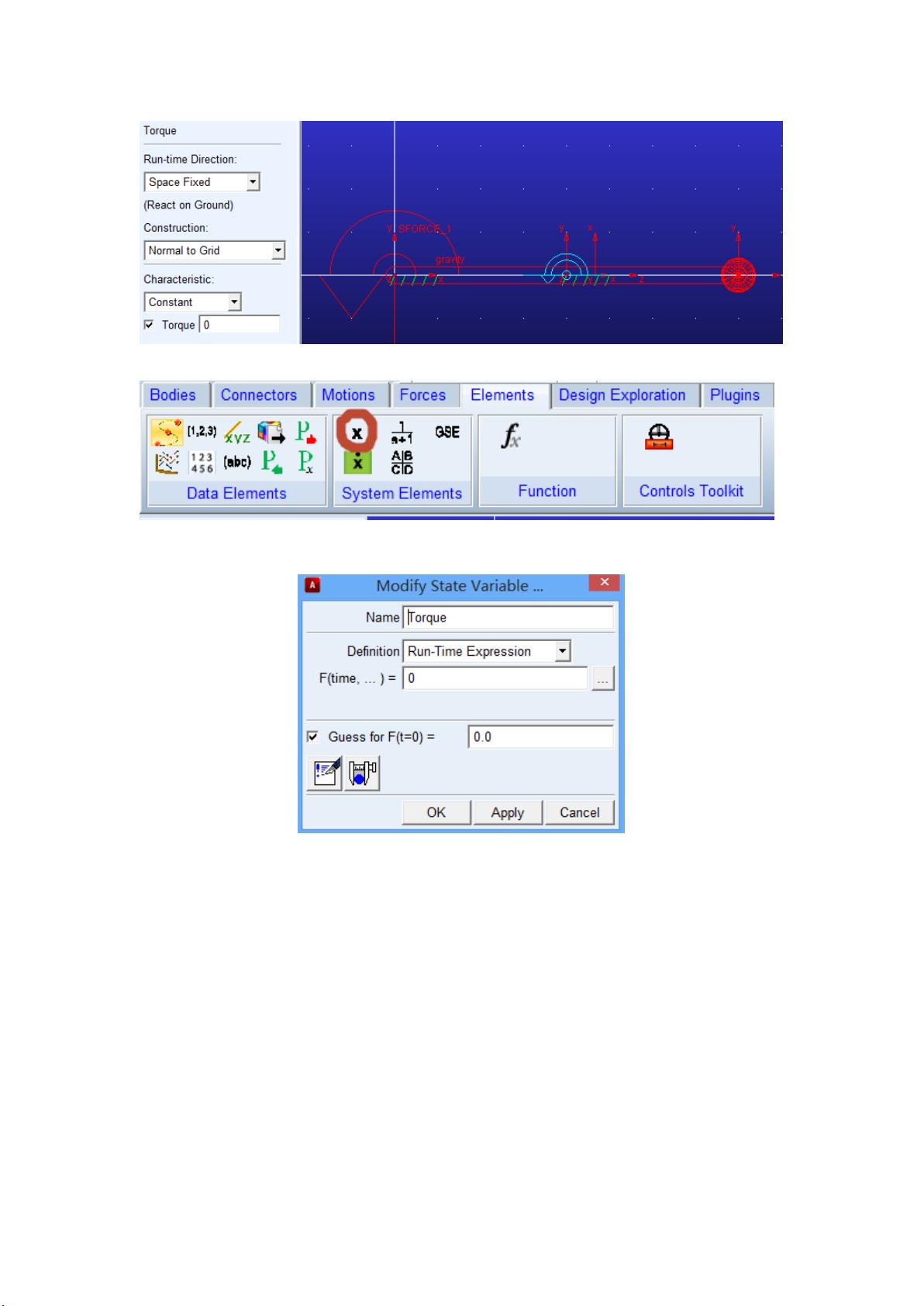
6、 创建输入状态变量
老版本单击菜单【Build】→【System Elements】→【State Variable】→【New】,弹出下图
所示的创建状态变量对话框,将 Name 输入框改成 Torque。单击 Ok 后,创建 Torque 变量。
7、将状态变量与模型关联
在图形区双击单分量力矩的图标,打开编辑对话框,如下图所示,在 Function 输入框中输
入 VARVAL(.link.Torque) , 这 里 VARVAL ( ) 是 一 个 ADAMS 函 数 , 它 返 回 变
量.link.Torque 的值。通过函数把状态变量 Torque 与力矩关联起来,力矩取值将来自于状态
变量 Torque。
剩余12页未读,继续阅读
2024-01-08 上传
2022-07-07 上传
2024-01-08 上传
2022-10-24 上传
2022-11-16 上传
2022-07-05 上传
2022-11-21 上传
2024-01-08 上传
2022-07-04 上传

yyyyyyhhh222
- 粉丝: 461
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
