CC1110无线单片机控制的双关节机器鱼系统
50 浏览量
更新于2024-09-02
收藏 413KB PDF 举报
"机供电,但对于CC1110无线单片机,需要3.3V的工作电压,因此需要一个DC-DC电压变换电路进行电压转换。这里采用常见的XL2576S DC-DC降压模块,其输入电压范围为4.5V至28V,输出电压可调,可以稳定输出3.3V电压。XL2576S通过调整电位器设置输出电压,确保为CC1110提供稳定的工作电源。
2.3 CC1110无线单片机
CC1110是一款超低功耗的无线微控制器,适用于IEEE 802.15.4、Zigbee和RF4CE应用。它集成了高性能射频收发器和8051微控制器,具有良好的无线通信能力和计算能力,是无线控制系统中的理想选择。CC1110的低功耗特性使其在电池供电的设备中表现出色,延长了机器鱼的运行时间。
2.4 舵机驱动模块
舵机是机器鱼执行动作的关键部件,通常使用标准的RC伺服电机。为了控制舵机的角度,需要一个舵机驱动电路。该电路通常包括一个PWM(脉宽调制)信号生成器,CC1110通过发送特定的PWM信号来控制舵机的角度。每个舵机都需要独立的控制信号,因此在设计时要考虑舵机数量和相应的信号线布局。
3 机器鱼控制系统软件设计
软件设计主要包括上位机程序和下位机程序两部分。上位机程序通常使用如Python或C#等编程语言开发,用于生成控制指令并发送到下位机。下位机程序则运行在CC1110单片机上,负责接收上位机的指令,解析数据,并控制舵机按照预设的运动规律工作。此外,还需要考虑无线通信协议的设计,确保指令在无线环境中的可靠传输。
4 系统测试与优化
在系统设计完成后,需要进行一系列的测试,包括无线通信距离测试、指令传输的准确性测试以及机器鱼在水中的运动性能测试。根据测试结果,对硬件和软件进行必要的调整和优化,以提高系统的稳定性和性能。
总结,基于CC1110无线单片机的机器鱼控制系统设计充分考虑了便携性、成本效益和能源效率,利用无线通信技术实现了远程控制。通过精心设计的硬件模块和软件算法,成功地构建了一个能够控制机器鱼游动的系统。这样的控制系统不仅适用于比赛,还具有广泛的应用前景,可以在水下监测、环境研究等多个领域发挥作用。"
基于基于CC1110无线单片机的机器鱼控制系统设计无线单片机的机器鱼控制系统设计
本文就是针对在国际水中机器人大赛的大平台上的三关节机器鱼而设计的一套双关节机器鱼控制系统。本机器
鱼控制系统具有体积小、成本低、微功耗等优点,可以方便地运用到类似的机器鱼产品中。
鱼类的游动具有高效性、机动性以及低噪性等优点。因此,仿生机器鱼的研究己成为机器人研究领域的热点。随着仿生机器鱼
研究的不断深入,仿生机器鱼在水下搜救、水质检测以及海洋资源勘探等领域发挥着重要的作用。近年来,机器鱼也成为国内
国际高校机器人比赛项目之一。本文就是针对在国际水中机器人大赛的大平台上的三关节机器鱼而设计的一套双关节机器鱼控
制系统。本机器鱼控制系统具有体积小、成本低、微功耗等优点,可以方便地运用到类似的机器鱼产品中。
1 机器鱼控制系统设计方案
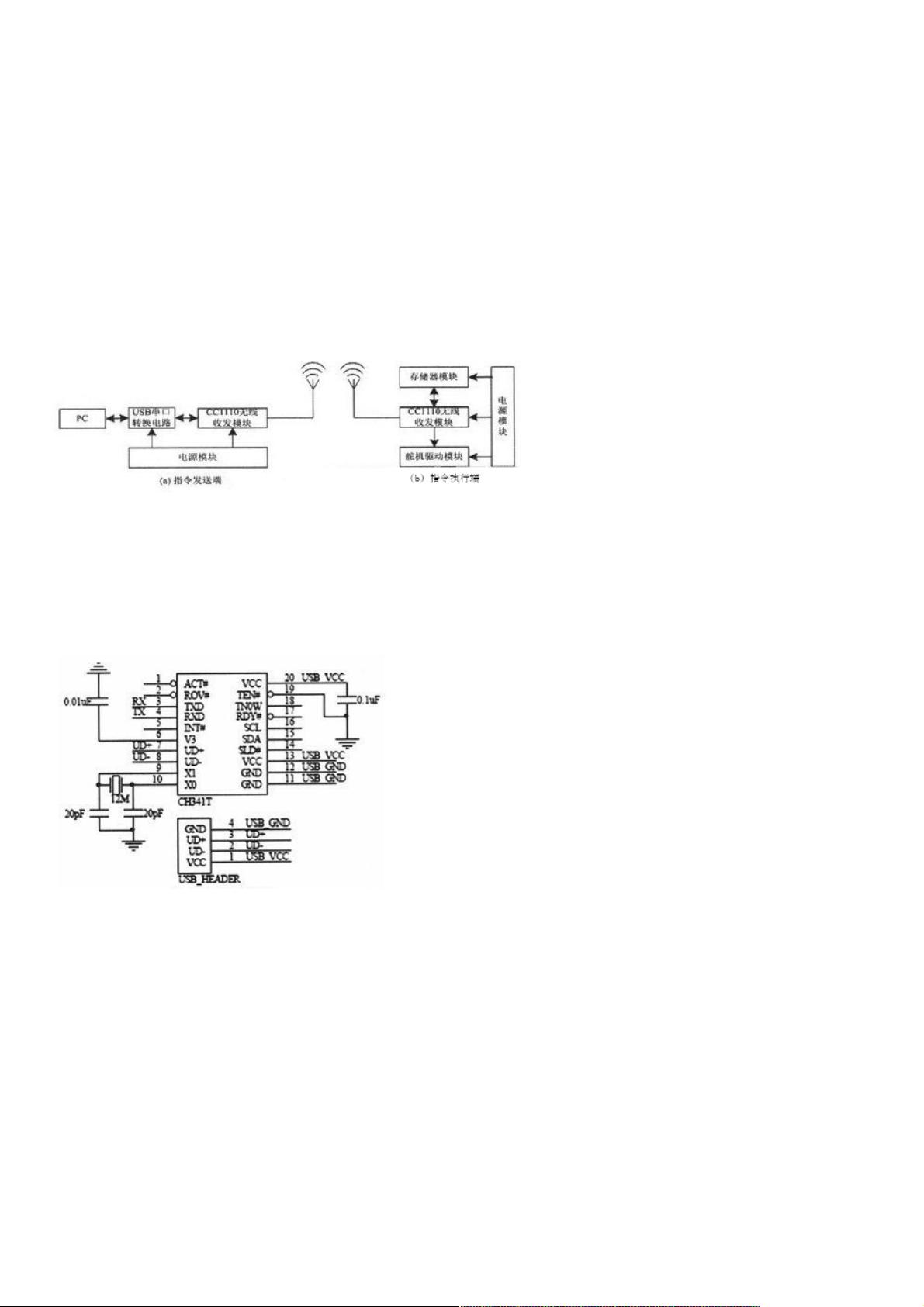
机器鱼控制系统总体结构如图1所示。系统主要分为指令发送端和指令执行端,两部分均以CC1110无线单片机作为核心控制
器,负责指令的发送、接收、数据处理,进而控制机器鱼的相关执行机构工作。指令发送端的指令来自上位机,USB串口转
换电路将USB接口模拟成串口,实现上位机与CC1110的串口通信。电源模块完成电压的变换,为相关电路提供各种合适的工
作电压。存储器模块存储机器鱼的相关信息。舵机驱动模块为执行机构舵机提供合适的控制信号。
图1 机器鱼控制系统总体结构图
2 机器鱼控制系统硬件设计
2.1 USB串口转换电路
CH341T是一款USB总线转接芯片,通过简单的接线即可实现USB接口和串口之间的转换,此时无需改动上位机与下位机的程
序,通过USB接口即可实现上位机与下位机的串行通信。USB串口转换电路原理图如图2所示。
图2 USB串口转换电路
在本设计电路中,将CH341T芯片的SDA和SCL引脚悬空,此时芯片功能为USB转异步串口,模拟计算机串口;CH341T芯片
的TXD和RXD两个引脚分别连接到CC1110无线单片机的RX(P0.2)和TX(P0.3)两个引脚;TEN#引脚为串口发送使能
端,接地使CH341T能发送数据。CH341T芯片的地要和CC1110无线单片机的地相连。CH341T不需外接电源,直接由上位机
通过USB口提供+5V电源。
2.2DC-DC电压变换电路
指令发送端由USB提供5V电压,指令执行端由电池提供5V直流电压。电池提供的5V直流电压可以直接为舵机驱动芯片以及舵
机供电。而系统内部CC1110无线单片机正常工作电压范围是2.0~3.6V,存储器芯片24AA01正常工作电压范围是1.7~5.5V,这
里可以将二者的工作电压选择为3.3V.为此,专门设计了一个DC-DC电压变换电路,将5V直流电压变换为3.3V直流电压后再提
供给CC1110无线单片机和24AA01芯片,以保证系统的正常工作。这里采用AMS公司生产的AMS1117芯片设计了电压变换电
路,具体的DC-DC电压变换电路如图3所示。
下载后可阅读完整内容,剩余4页未读,立即下载
2020-10-19 上传
点击了解资源详情
2020-08-13 上传
2022-08-03 上传
2021-01-19 上传
2020-11-04 上传

weixin_38731761
- 粉丝: 7
- 资源: 920
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
