




惯导与组合导航开发进展与挑战:从纯惯导到卡尔曼滤波
版权申诉
"这篇文档是关于惯性导航系统(INS)开发的工作进展和挑战的总结,作者使用了PSINS框架作为参考。文档包含了纯惯导解算的详细步骤,包括姿态更新、圆锥效应和旋转效应补偿、速度及位置更新的代码实现。同时,文档提到了组合导航中卡尔曼滤波器的框架构建,但遇到了如何利用Allan方差提取参数以进行准确的组合导航算法验证的问题。此外,还讨论了缺少GPS数据以进行验证、传感器数据标定和初始对准等后续任务。"
本文档详细阐述了作者在开发惯导系统过程中遇到的问题和取得的进展。首先,文档介绍了纯惯导解算的核心部分。姿态更新使用四元数进行,通过已知的前一时刻姿态、当前和前一时刻的陀螺角增量,计算出当前时刻的姿态。接着,文档详细列出了求取等效旋转矢量的计算公式,分别对应于b系和n系的变化,并给出了地球相关参数的计算方法。
在速度和位置更新方面,文档提到了线性外推法来更新速度,以及结合位置更新的代码实现。圆锥效应和旋转效应的补偿是惯导系统中重要的误差修正步骤,文档简要提及了这些补偿过程,但未给出具体实现细节。速度更新和位置更新的代码片段被提供,以展示实际的编程实现。
在组合导航框架构建方面,已经完成了卡尔曼滤波器的基础结构,包括状态转移矩阵、系数矩阵和量测更新的代码。然而,面临的主要挑战是如何从Allan方差分析中提取出陀螺和加速度计的关键参数,如角度和速度随机游走、方差和相关时间,这些参数对于组合导航的精度至关重要。
验证组合导航算法的准确性是另一个难题,因为缺乏真实的GPS数据进行对比。作者尝试模拟随机噪声来模拟GPS数据,但不确定这种方法是否会影响验证结果。此外,传感器数据的标定,如陀螺和加速度计的零偏校准,尚未进行,这同样是卡尔曼滤波器的重要输入。
最后,文档指出PSINS中已有初始对准的代码,但作者可能需要自定义这部分来适应特定的初始条件,尽管这可能不是当前阶段的最优先任务。这份文档全面地展示了惯导系统开发的复杂性和面临的各种技术挑战。
目前工作进度
1.完成纯惯导解算部分
姿态更新
使用四元数进行姿态更新,已知量是前一时刻用四元数表示的姿态、当前及前一时刻的陀
螺角增量输出,待求量是当前时刻用四元数表示的姿态。
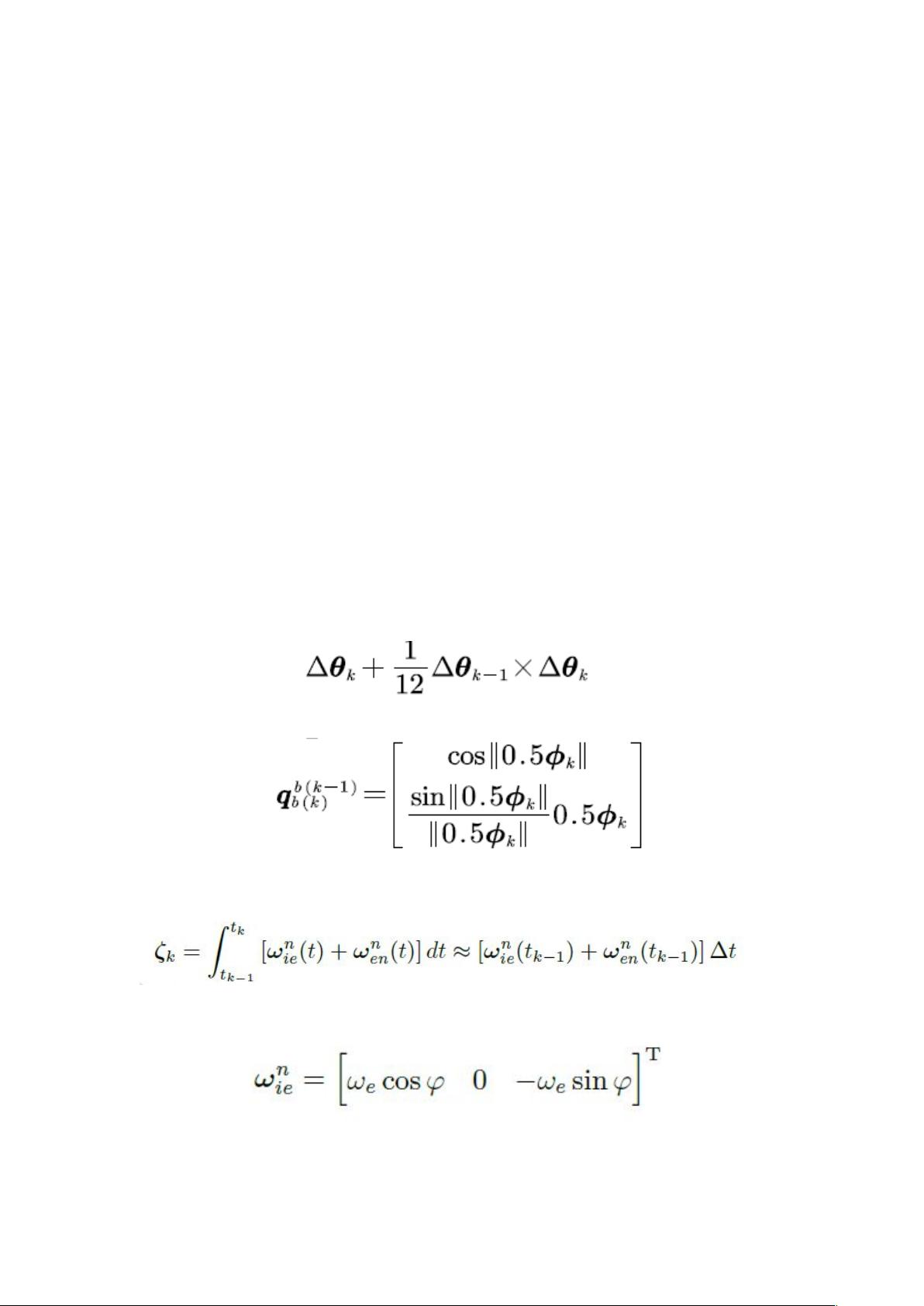
求取等效旋转矢量
表示 b 系姿态变化的等效旋转矢量使用双子样计算式求取:
随后可求得对应的姿态四元数:
表示 n 系姿态变化的等效旋转矢量使用下式求取:
其中 wnie 表达式如下:
,wnen 表达式如下:
下载后可阅读完整内容,剩余7页未读,立即下载
677 浏览量
1126 浏览量
650 浏览量
2022-11-20 上传
123 浏览量
14167 浏览量
20528 浏览量
6916 浏览量

十八与她
- 粉丝: 1392
 我的内容管理
展开
我的内容管理
展开








最新资源
- jpbot:将IRC消息转发至Mastodon的Python项目
- 基于C语言的单片机串口通信开发指南
- 安卓WebView中的新浪微博Oauth2.0认证实现方法
- MATLAB工具箱下的神经网络理论与实践指南
- JAVA毕业设计:精选系统范例与全面开发指南
- Excel VBA编程实用技巧汇总
- 快速关注Mastodon用户指南与实现
- Cocos2dx 3.0版本的RichText控件源码解析
- 10部算法经典著作深度解读
- Matlab实现太阳能光伏板输出特性模拟
- Tapestry 4官方中文文档及快速入门指南
- 定时控制软件启动与关机的实用工具
- CA6140车床拨叉831003的设计与应用
- Mastodon浏览辅助工具集:提升浏览体验的JavaScript应用
- QT数据库操作基础:增删改查及用户任务数据管理
- S1html项目作业与上机实践汇总






















