PID控制技术原理与应用详解
PID控制书籍
本书籍详尽地描述了各种PID控制的原理和应用,涵盖了数字PID控制、常用的PID控制系统、专家PID控制、模糊PID控制和神经PID控制等方面的知识点。
数字PID控制
PID控制是自动控制领域中最常用的控制算法之一,它可以对系统进行实时监控和调整,以达到期望的控制效果。数字PID控制是PID控制的一种实现方式,它通过数字信号来实现控制。
* 位置式PID控制算法:该算法是PID控制的基本形式,通过调整比例、积分和微分三个参数来实现控制。
* 连续系统的数字PID控制仿真:对连续系统进行数字PID控制仿真,以验证控制算法的有效性。
* 离散系统的数字PID控制仿真:对离散系统进行数字PID控制仿真,以验证控制算法的有效性。
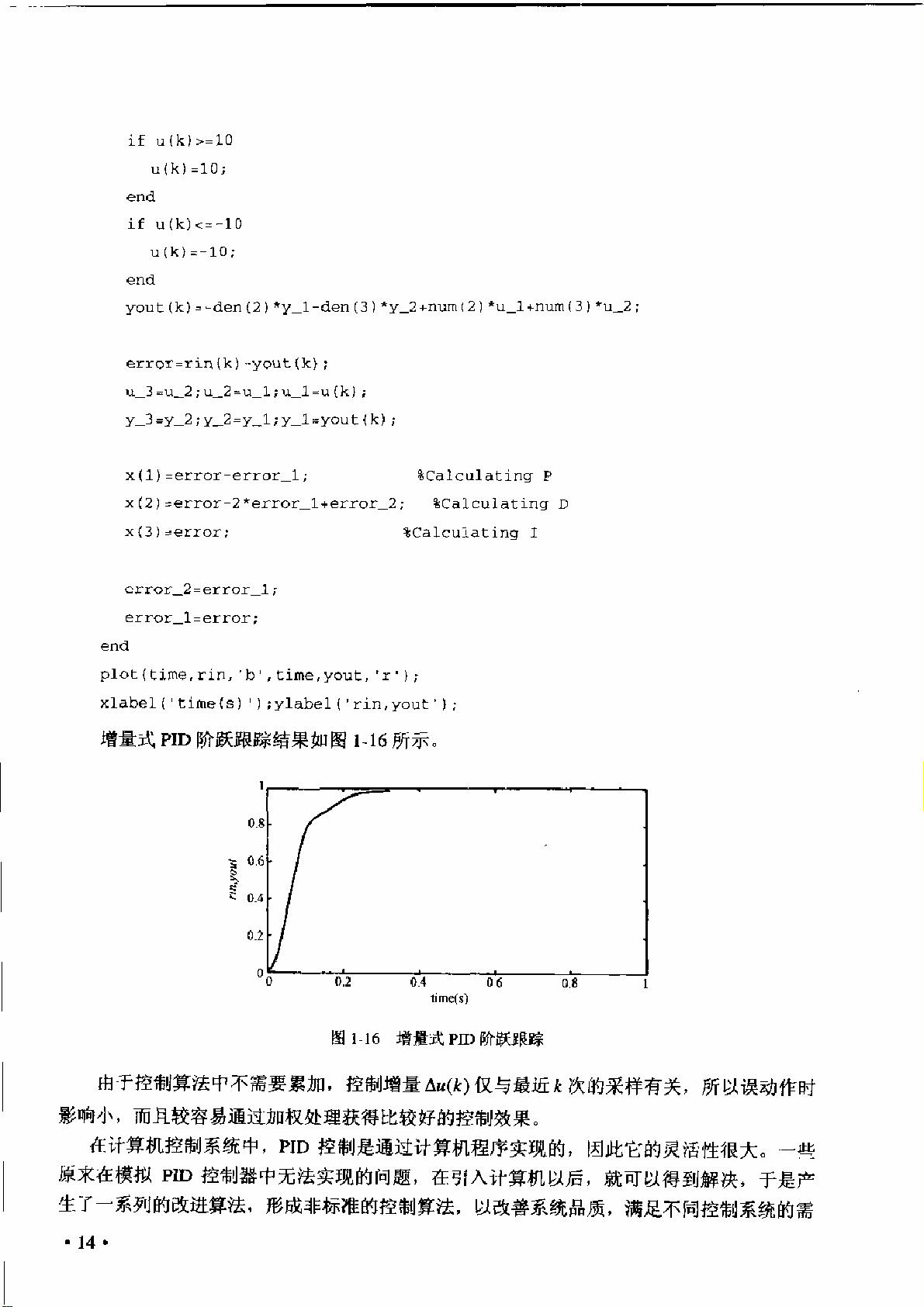
* 增量式PID控制算法及仿真:该算法是PID控制的一种变形,通过增量式调整参数来实现控制。
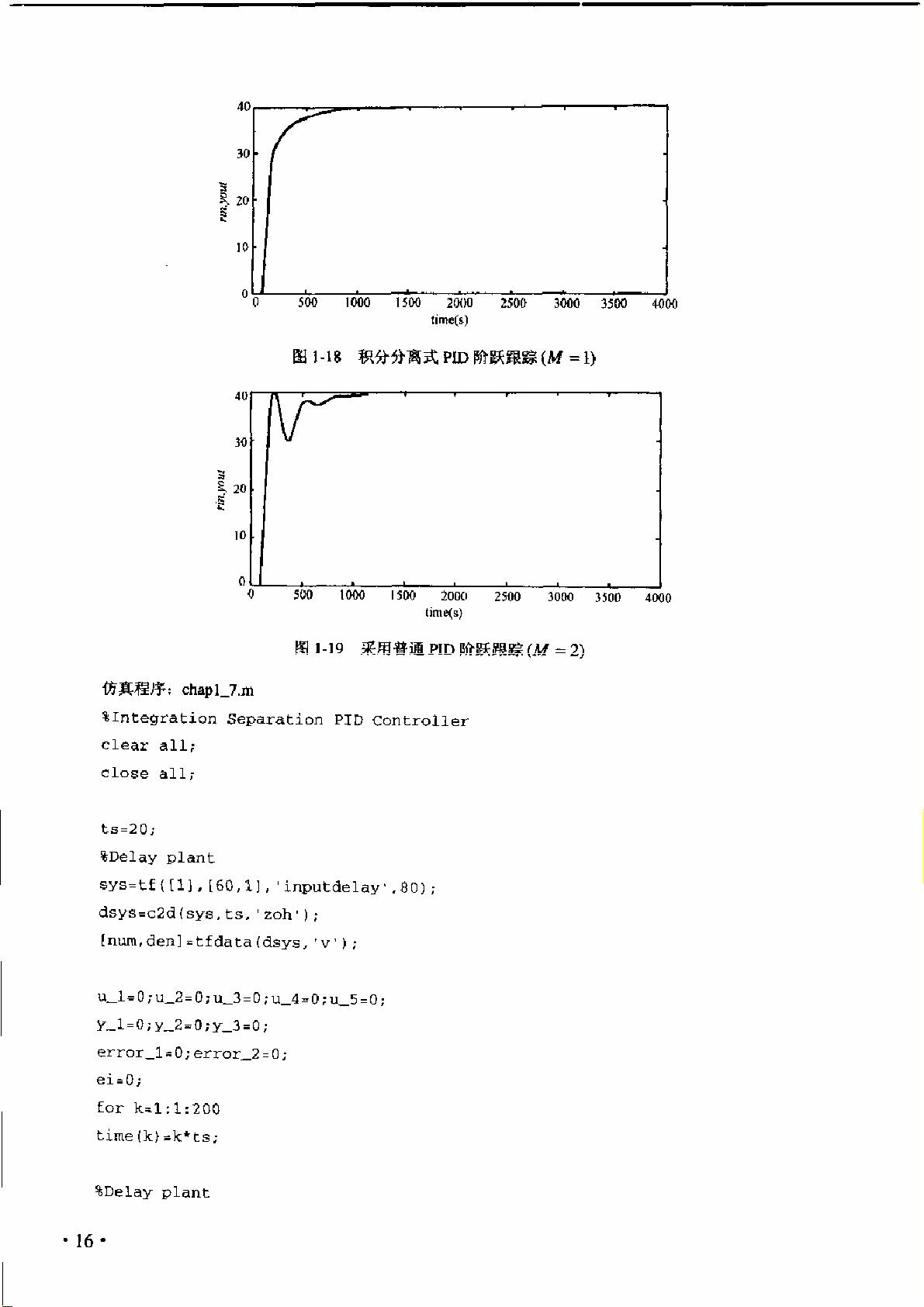
* 积分分离PID控制算法及仿真:该算法是PID控制的一种变形,通过积分分离来实现控制。
* 抗积分饱和PID控制算法及仿真:该算法是PID控制的一种变形,通过抗积分饱和来实现控制。
* 梯形积分PID控制算法:该算法是PID控制的一种变形,通过梯形积分来实现控制。
* 变速积分PID算法及仿真:该算法是PID控制的一种变形,通过变速积分来实现控制。
* 带滤波器的PID控制仿真:该算法是PID控制的一种变形,通过带滤波器来实现控制。
* 不完全微分PID控制算法及仿真:该算法是PID控制的一种变形,通过不完全微分来实现控制。
* 微分先行PID控制算法及仿真:该算法是PID控制的一种变形,通过微分先行来实现控制。
* 带死区的PID控制算法及仿真:该算法是PID控制的一种变形,通过带死区来实现控制。
* 基于前馈补偿的PID控制算法及仿真:该算法是PID控制的一种变形,通过基于前馈补偿来实现控制。
* 步进式PID控制算法及仿真:该算法是PID控制的一种变形,通过步进式来实现控制。
常用的PID控制系统
* 单回路PID控制系统:该系统是PID控制的基本形式,通过单个回路来实现控制。
* 串级PID控制:该系统是PID控制的一种变形,通过串级连接多个PID控制器来实现控制。
* 纯滞后系统的大林控制算法:该算法是PID控制的一种变形,通过纯滞后系统来实现控制。
* 纯滞后系统的Smith控制算法:该算法是PID控制的一种变形,通过纯滞后系统来实现控制。
专家PID控制和模糊PID控制
* 专家PID控制:该算法是PID控制的一种变形,通过专家系统来实现控制。
* 模糊自适应整定PID控制:该算法是PID控制的一种变形,通过模糊自适应整定来实现控制。
* 模糊免疫PID控制算法:该算法是PID控制的一种变形,通过模糊免疫来实现控制。
神经PID控制
* 基于单神经元网络的PID智能控制:该算法是PID控制的一种变形,通过单神经元网络来实现控制。
* 基于BP神经网络整定的PID控制:该算法是PID控制的一种变形,通过BP神经网络来实现控制。
* 基于RBF神经网络整定的PID控制:该算法是PID控制的一种变形,通过RBF神经网络来实现控制。
* 基于RBF神经网络辨识的单神经元PID模型参考自适应控制:该算法是PID控制的一种变形,通过RBF神经网络辨识来实现控制。
本书籍系统地描述了PID控制的原理和应用,涵盖了数字PID控制、常用的PID控制系统、专家PID控制、模糊PID控制和神经PID控制等方面的知识点,为读者提供了系统的PID控制知识。

1120 浏览量
1773 浏览量
263 浏览量
331 浏览量
196 浏览量
2019-08-14 上传
174 浏览量

clq__fly
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 传智播客教学:苏坤主讲骑士飞行棋C#开发教程
- Andy Harris著作:HTML5傻瓜书快速参考指南
- document-change-sketchplugin:处理文档变更的SketchJS示例插件
- 数字信号处理(DSP)原理与应用全面教学
- 户外线路跟踪利器:基于Google Map的Android线路记录器
- Swift通过CocoaPods动态生成直方图图表教程
- 软件学院实验:复数计算器的设计与实现
- STM32控制ENC28j60网络模块完整项目资料及程序
- Linux环境编译Java项目含第三方库包教程
- Leaflet.PolylineMeasure: 实现地理路径长度测量的JavaScript插件
- 使用Sketch-Predefined-Pages插件优化设计工作流程
- 淘淘商城前端开发资源包:JS、CSS代码解压即用
- iPhoneAxure组件资源库:免费下载iPhone主题设计
- 2440开发板硬件原理图详细解读
- 探索Swift动画开发:SHSnowflakes雪花飘落效果
- 施耐德编程软件:特维德PLC编辑器
