利用互信息最大化进行多模态医学图像配准
需积分: 10 79 浏览量
更新于2024-09-08
收藏 625KB PDF 举报
"maesmiimageregpdf-maes_mi_image_reg.pdf——使用互信息最大化的多模态医学图像配准"
这篇论文"Multimodality Image Registration by Maximization of Mutual Information"发表在1997年4月的IEEETRANSACTIONSONMEDICALIMAGING期刊第16卷第2期,作者包括Frederik Maes、Andr´e Collignon、Dirk Vandermeulen、Guy Marchal和Paul Suetens,他们都是IEEE的成员。论文主要探讨了一种新的多模态医学图像配准方法,利用信息论中的基本概念——互信息(Mutual Information, MI)或相对熵,作为图像配准的新匹配标准。
互信息是一种度量两个随机变量之间相互依赖程度的指标,它在统计上衡量了两个图像对应体素强度之间的信息冗余。在几何对齐的理想情况下,如果两幅图像匹配,这种冗余通常达到最大值。该方法的优点在于,它不假设这种依赖关系的性质,并且不对涉及的模态图像内容施加任何限制性约束,因此具有广泛的适用性和强大的配准能力。
论文通过与立体定向注册的比较,验证了互信息准则在刚体配准中的准确性。具体实验涵盖了计算机断层扫描(CT)、磁共振成像(MRI)以及正电子发射断层扫描(PET)图像的配准。这种方法的准确性和有效性通过实际数据进行了验证,证明了其在解决多模态医学图像配准问题上的潜力。
在医学图像处理领域,配准是关键步骤之一,因为它允许不同成像技术的数据融合,从而提供更全面的解剖结构或生理功能信息。例如,CT图像可以提供良好的解剖结构细节,而MRI则擅长显示软组织对比,PET则能反映生物代谢活动。通过互信息最大化的配准,这些不同模态的图像可以有效地结合,提升诊断和治疗决策的精度。
论文进一步可能讨论了计算互信息的算法实现,以及优化过程以找到最佳配准参数。此外,可能还包含了对不同图像配准技术的比较,以及对配准误差的分析和评估方法。这种方法的创新性在于引入了一个通用的、不受特定图像特征限制的配准准则,为多模态医学图像分析开辟了新的路径。
MAES et al.: MULTIMODALITY IMAGE REGISTRATION BY MAXIMIZATION OF MUTUAL INFORMATION 189
(a) (b)
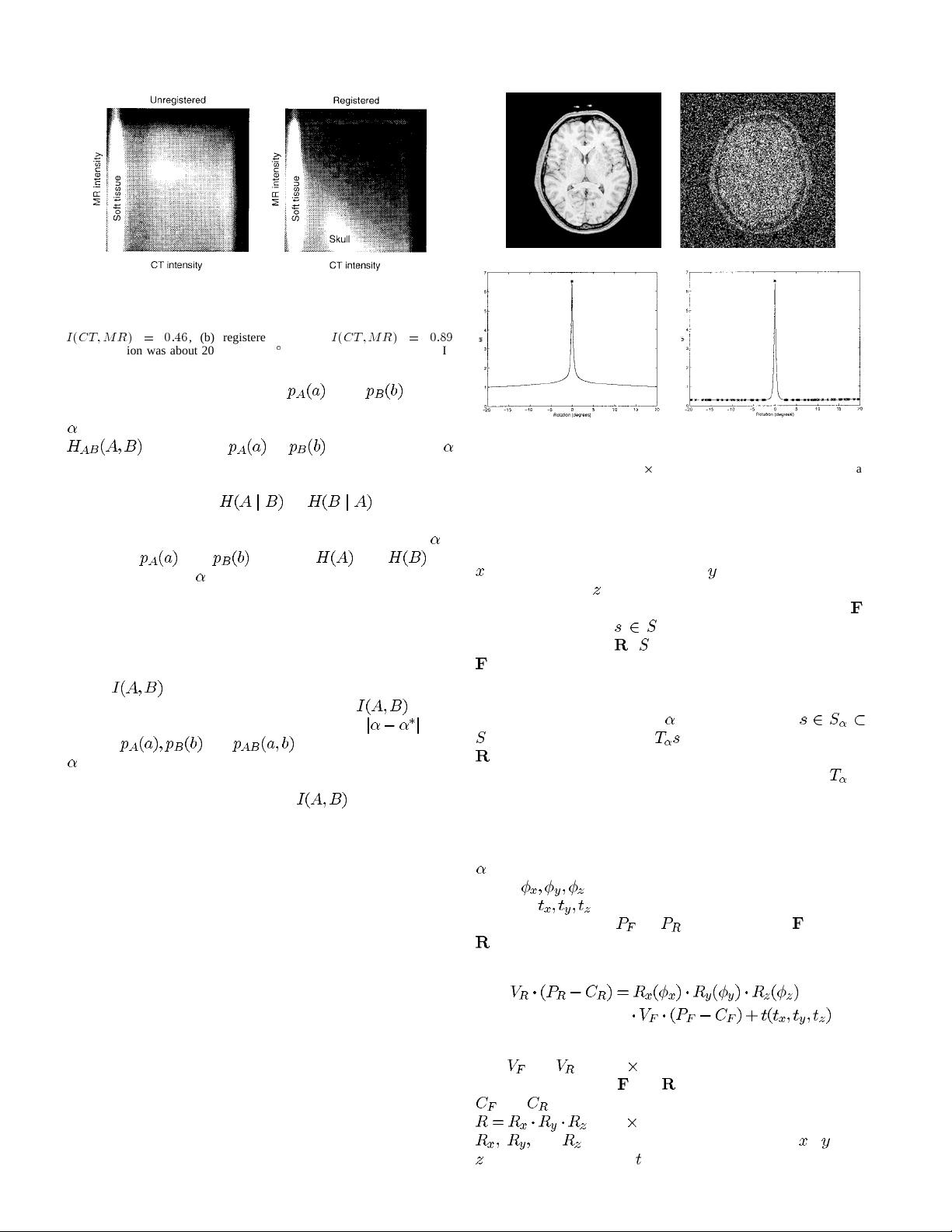
Fig. 1. Joint histogram of the overlapping volume of the CT and MR
brain images of dataset A in Tables II and III: (a) Initial position:
I
(
CT; MR
)=0
:
46
, (b) registered position:
I
(
CT;M R
)=0
:
89
.
Misregistration was about 20 mm and 10
(see the parameters in Table III).
If both marginal distributions and can be
considered to be independent of the registration parameters
, the MI criterion reduces to minimizing the joint entropy
[6]. If either or is independent of ,
which is the case if one of the images is always completely
contained in the other, the MI criterion reduces to minimizing
the conditional entropy
or . However, if
both images only partially overlap, which is very likely during
optimization, the volume of overlap will change when
is
varied and
and and also and will
generally depend on
. The MI criterion takes this into account
explicitly, as becomes clear in (2), which can be interpreted
as follows [27]: “maximizing MI will tend to find as much
as possible of the complexity that is in the separate datasets
(maximizing the first two terms) so that at the same time they
explain each other well (minimizing the last term).”
For
to be useful as a registration criterion and
well behaved with respect to optimization,
should
vary smoothly as a function of misregistration
. This
requires
and to change smoothly when
is varied, which will be the case if the image intensity
values are spatially correlated. This is illustrated by the graphs
in Fig. 2, showing the behavior of
as a function of
misregistration between an image and itself rotated around the
image center. The trace on the left is obtained from an original
MR image and shows a single sharp optimum with a rather
broad attraction basin. The trace on the right is obtained from
the same image after having reduced the spatial correlation of
the image intensity by repeatedly swapping pairs of randomly
selected pixels. This curve shows many local maxima and
the attraction basin of the global maximum is also much
smaller, which deteriorates the optimization robustness. Thus,
although the formulation of the MI criterion suggests that
spatial dependence of image intensity values is not taken into
account, such dependence is in fact essential for the criterion
to be well behaved around the registration solution.
III. A
LGORITHM
A. Transformation
Each of the images is associated an image coordinate frame
with its origin positioned in a corner of the image, with the
(a) (b)
Fig. 2. Spatial correlation of image intensity values increases MI registration
robustness. Top: (a) original 256
2
256 2-D MR image and (b) image of (a)
shuffled by swapping 30 000 randomly selected pixel pairs. Both images have
the same image content. Bottom: MI registration traces obtained using partial
volume distribution (PV) interpolation for in-plane rotation of each image
over itself. Local maxima are marked with “*”.
axis along the row direction, the axis along the column
direction, and the
axis along the plane direction.
One of the images is selected to be the floating image,
,
from which samples
are taken and transformed into
the reference image,
. can be the set of grid points of
or a sub- or superset thereof. Subsampling of the floating
image might be used to increase speed performance, while
supersampling aims at increasing accuracy. For each value
of the registration parameter
only those values
are retained for which falls inside the volume of
.
In this paper, we have restricted the transformation
to
rigid-body transformations only, although it is clear that the
MI criterion can be applied to more general transformations as
well. The rigid-body transformation is a superposition of a 3-
D rotation and a 3-D translation and the registration parameter
is a six-component vector consisting of three rotation
angles
(measured in degrees) and three translation
distances
(measured in millimeters). Transformation
of image coordinates
to from the image to image
is given by
(8)
with
and being 3 3 diagonal matrixes representing the
voxel sizes of images
and , respectively (in millimeters),
and the image coordinates of the centers of the images,
the 3 3 rotation matrix, with the matrixes
and representing rotations around the -, -, and
-axis, respectively, and the translation vector.
剩余11页未读,继续阅读
2011-05-27 上传
2021-03-22 上传
2021-04-18 上传
2021-06-01 上传
2023-07-14 上传
2019-10-23 上传
2022-11-28 上传
2021-08-19 上传

weixin_39840588
- 粉丝: 451
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
