MATLAB相机标定教程:从入门到精通
需积分: 50 158 浏览量
更新于2024-09-10
1
收藏 1.65MB PDF 举报
"这篇教程是关于使用MATLAB进行相机标定和校准的中文指南,适合需要理解相机标定过程的初学者。教程涵盖了单相机标定的基本步骤,包括使用相机标定APP来获取和评估内外参数,以及如何提高标定精度。"
在计算机视觉领域,相机标定是至关重要的一步,它能够校正相机固有的光学误差,如镜头畸变,从而使图像数据更准确地反映现实世界。MATLAB提供了用户友好的相机标定APP,简化了这一过程。
首先,了解相机标定的目的是估算相机的内参数(如焦距、主点坐标)和外参数(如相机位置和姿态),以及镜头的畸变系数。这些参数在应用场景如目标检测、三维重建、机器人导航等中起到关键作用。
教程中提到的单相机标定工作流程包括六个步骤:
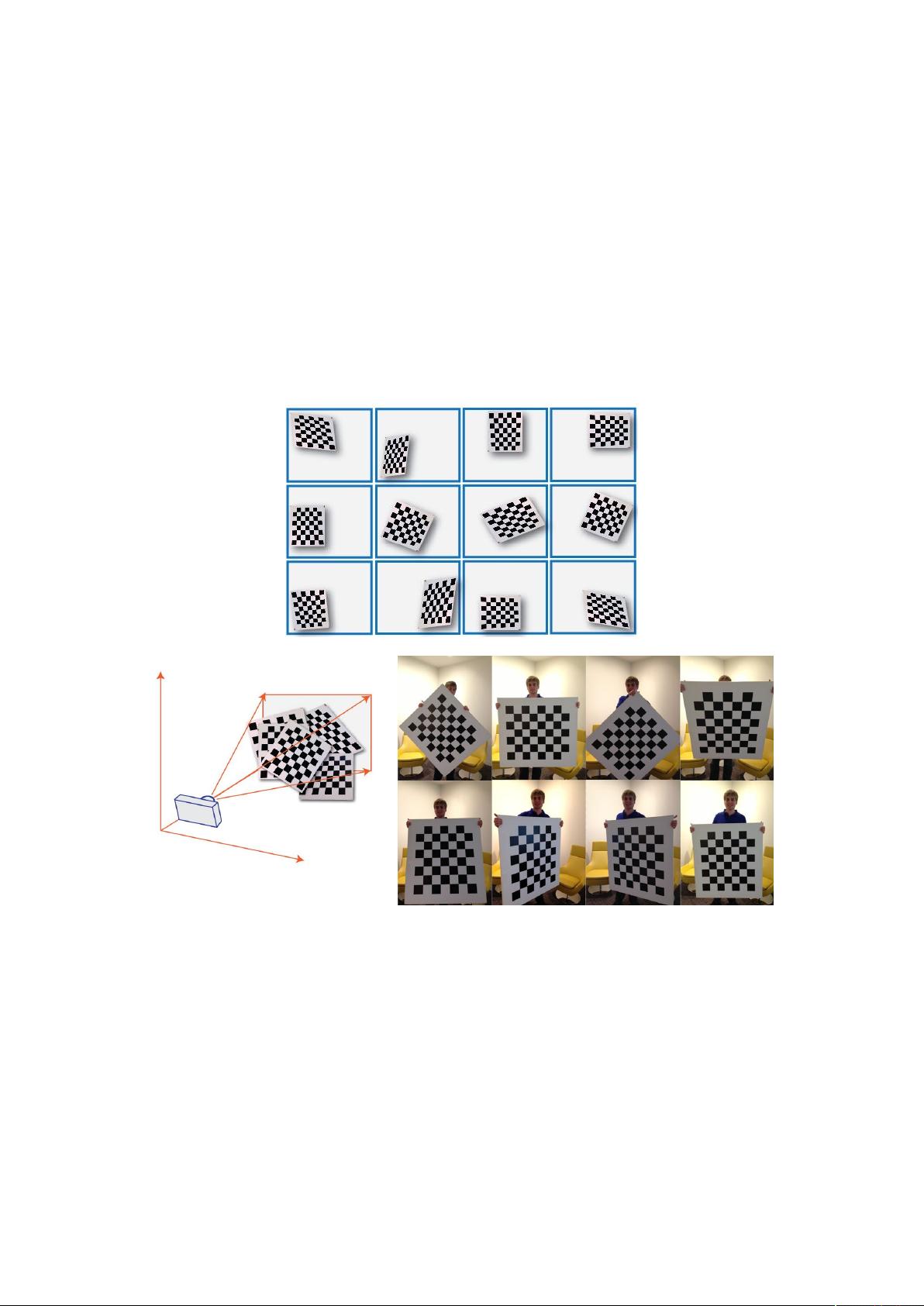
1. 准备标定所需的图片、相机和标定板,例如棋盘格图案。
2. 在APP中加载这些包含标定板的图片。
3. 进行相机的标定,APP会自动检测并识别棋盘格的角点。
4. 评估校准的精度,通过比较标定前后图像中棋盘格角点的位置差异。
5. 如有必要,可以调整参数以优化结果。
6. 最后,保存输出的参数对象,供后续计算视觉算法使用。
为了获得最佳标定效果,应遵循一些提示:
- 使用10至20张不同角度和光照条件的图片。
- 图像应为无损格式,如PNG,以减少压缩引入的误差。
- 标定板应放置于平整无缺陷的表面上,避免影响标定精度。
- 棋盘格的大小需要预先测量,且应有偶数行和奇数列,以便确定标定板的方向。
- 摄像头设置应保持不变,如焦点和缩放,避免自动对焦和变焦。
- 尽量减少背景杂乱,提高角点检测的速度和准确性。
此外,若需要自定义标定板或使用特定的标定方法,可以利用MATLAB的相机标定函数,如`cameraCalibrator`,该函数属于MATLAB的几何相机校正模块。
这个中文教程详细介绍了如何在MATLAB中进行相机标定,对想要深入理解或实践相机标定的用户来说非常有用。通过遵循教程中的步骤,用户可以有效地校准自己的相机,提升计算机视觉应用的性能。
为达到最佳效果,使用至少 10 到 20 的包含标定板的图像。标定 APP 至少需要三个图像。 使用未压缩的图
像或图像无损压缩格式如 PNG。为了提高标定精度:
1. 捕获的图像模式大约距离等于距离你的相机感兴趣的对象。 例如,如果您计划从 2 米测量对象,保持你
的从相机模式大约 2 米。
2. 把棋盘角度小于 45 度相对于相机平面。
3. 不要修改图片。例如,没有裁剪他们。
4. 不使用自动对焦或缩放图像。
5. 在相对于相机不同位置捕获的图像 棋盘状图案。
6. 捕获足够的不同模式的图像,你已经覆盖尽可能多的图像帧。 在图像边缘镜头畸变会快速增加增加。
为了捕捉这些透镜畸变, 该标定板必须出现接近边缘的位置。
作为一般规则,棋盘标定板应该填补至少 20%的捕获的图像。例如, 前面的图片拍摄的棋盘方块的大小为
108 毫米。
添加图片
开始校准,必须添加图片。您可以添加保存好的图像从一个文件夹或直接从相机
添加图片。程序自动分析了图像,以确保它们满足标定的要求然后检测角点。
从文件夹添加图片
剩余13页未读,继续阅读
2681 浏览量
点击了解资源详情
191 浏览量
564 浏览量
2089 浏览量
553 浏览量
2025-03-08 上传

moonqy
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实现Android仿支付宝芝麻信用分圆盘效果
- less2sass:从LESS到SASS的转换工具
- LaTex课程备忘单:涵盖3D视觉与人工智能技术
- 工厂工资管理系统:数据库学习应用实例
- 硬盘安装Windows7/Win2008实用工具NT6-HDD-Installer
- 粒子爆炸特效制作与源码重构技巧
- Qt和OpenCV实现视频截图工具
- Echart中国地图数据包:包含省份和市的JSON文件
- Java项目实现每满300减优惠功能
- wlck端口扫描工具:高效安全的网络检测
- CakePHP 3.0数据库迁移插件:使用phinx实现数据迁移
- 动态切换主页图片:jquery.cycle插件使用实例
- JavaWeb学生宿舍管理系统部署指南
- 无需标记的增强现实技术:ProCamTracker的探索
- VC实现的Aprior算法程序深入知识发现与数据挖掘
- 新版大华视频IOS开发包及完整代码实例
