自适应空间正则化提升视觉目标跟踪准确性的关键算法
版权申诉
63 浏览量
更新于2024-07-03
收藏 2.06MB DOCX 举报
本文档主要探讨了一种基于自适应空间正则化的视觉目标跟踪算法,旨在解决相关滤波类视觉跟踪方法中存在的边界效应问题。该算法的核心创新在于在经典滤波模型中融入了自适应空间正则化概念,通过在相邻帧之间建立正则权重的关联,动态调整当前帧的模型正则化权重,从而有效减少边界效应对跟踪性能的影响。
算法的关键组成部分包括:
1. 自适应空间正则化:通过这种方式,算法能够根据目标和背景的实时变化,自动调整正则化程度,避免因边缘区域的噪声或背景干扰导致的误跟踪。这种方法增强了模型的鲁棒性和稳定性。
2. 自适应宽高比尺度估计:针对目标可能发生的尺寸变化,算法采用了灵活的尺度估计策略,确保在不同形状和大小的目标上都能实现准确的追踪。
3. 颜色直方图相似度模型更新:基于颜色信息的变化检测,算法会定期更新模型,这样可以抑制模型漂移,提高跟踪精度,尤其是在颜色纹理变化较大的场景下。
实验结果表明,该算法在UAV123、OTB2013和OTB2015这三个知名视觉跟踪基准数据集上表现出色,相较于其他竞品,其跟踪成功率和精确度均有显著提升。特别是在面对运动模糊和目标平面旋转等复杂场景时,与第二名算法相比,分别有9.72%和9.03%的显著优势,证明了算法的优良适应性和鲁棒性。
总结来说,这个基于自适应空间正则化的视觉目标跟踪算法不仅继承了相关滤波技术的优点,如高效性和实时性,而且通过引入自适应策略,成功地解决了边界效应问题,从而在实际应用中展现出更强大的跟踪能力和准确性。这对于视觉跟踪领域的研究者和开发者来说,是一个值得深入研究和借鉴的技术突破。
) 提 取输 入 图 像 的 方向 梯 度 直 方 图 "%''(
('%, ,8)特征,并利用 88?':; 的 15 和 15
分别提取图像浅层和深层特征;
)提取的特征与滤波器进行相关运算/得到多个特征响应,经过融
合得到相关滤波响应图,进而获取目标位置;
7)利用自适应宽高比的尺度估计方法得到目标尺度;
)判断估计的目标与前一帧目标颜色直方图相似度是否高于阈值
若满足,则进行滤波器更新,否则不更新滤波器
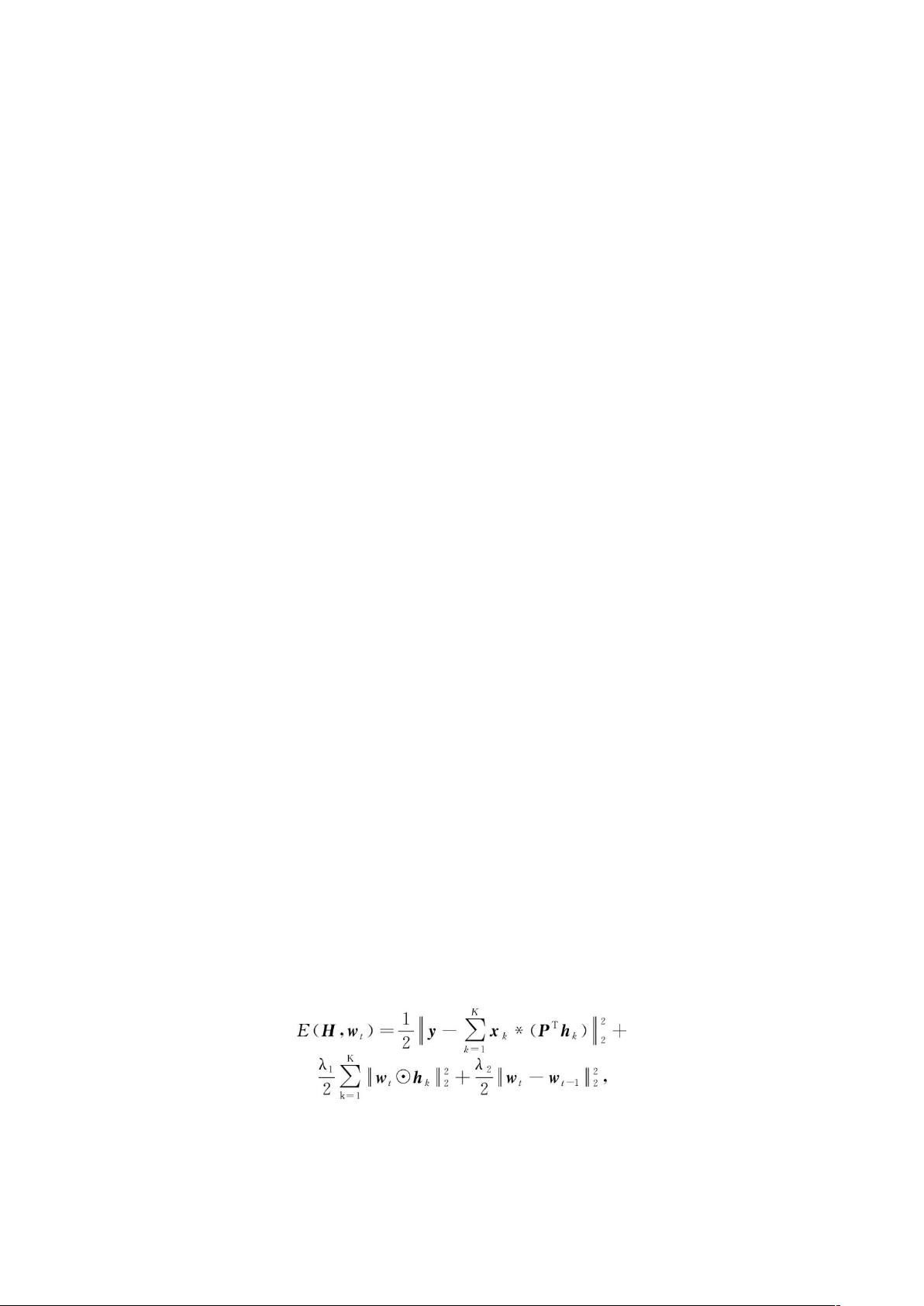
1.2 自适应空间正则化模型
经典的相关滤波模型采用循环移位的方式进行采样,虽然大大提
高了样本数量但也带来了边界位置周期性重复的问题,导致模型使用
了一些非真实样本进行训练同时,由于正样本周围不可避免地包含一
些背景信息,在训练过程中分类器容易将这些紧邻目标的背景视作目
标进行特征学习,降低了整体的跟踪性能为解决这个问题,本文提出
一种引入自适应空间正则化的算法模型在经典的相关滤波模型中引入
自适应空间正则化项,通过建立正则化权重在相邻帧之间的关联,自
适应调整模型的正则约束目标函数定义如式"):
")
剩余17页未读,继续阅读
2022-12-15 上传
2022-05-29 上传
2022-11-28 上传
2023-02-23 上传
2022-12-01 上传
2022-07-13 上传
2023-02-23 上传
2023-02-23 上传
2021-10-01 上传

罗伯特之技术屋
- 粉丝: 4494
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







