结构化约束下的增量式VIO三维网格生成
需积分: 0 189 浏览量
更新于2024-08-05
收藏 3MB PDF 举报
"这篇论文提出了一种新的方法,即在增量式视觉惯性 odometry (VIO) 中结合结构化规则来生成3D网格。VIO通常依赖于场景的点云表示,但这种表示无法捕获环境的拓扑结构。通过VIO算法三角化的稀疏且有噪声的3D地标往往不能准确反映真实场景。为了使生成的3D网格更加规整,以往的方法将状态估计与3D网格平滑步骤解耦,或者限制网格仅在当前帧内,或者允许网格无限增长。然而,这种方法可能会导致问题,如覆盖范围不足或计算资源过度消耗。
论文作者Antoni Rosinol等人提出了一种创新的因子图形式化方法,将网格平滑与状态估计紧密耦合,并通过检测和强制结构规则性来优化这一过程。他们还建议逐步构建网格,将其范围限制在VIO优化的时间范围内。这样生成的3D网格不仅覆盖了比单帧方法更大的场景部分,而且在内存使用和计算效率上也更为高效。
在该方法中,结构化规则可能包括环境中的直线、平面和其他几何特征,这些特征可以通过边缘检测和表面拟合等技术来识别。这些结构信息被整合到VIO的优化框架中,从而改进了状态估计的准确性,同时保持了网格的连贯性。此外,通过限制网格扩展的时间窗口,可以有效地管理内存需求,避免无限增长的3D模型带来的计算负担。
论文可能详细讨论了如何构建这个因子图模型,如何处理传感器数据的不确定性,以及如何在实时系统中实现这个过程。作者可能还通过实验验证了他们的方法,对比了与其他现有VIO技术的性能,展示了在不同环境和条件下的优势。
这项工作对于提升VIO的性能和实用性具有重要意义,特别是在机器人导航、增强现实和自动化系统等领域,能够更准确地重建和理解周围环境,同时保持计算资源的有效利用。"
Incremental Visual-Inertial 3D Mesh
Generation with Structural Regularities
Antoni Rosinol
1
, Torsten Sattler
2
, Marc Pollefeys
3
, Luca Carlone
1
Abstract— Visual-Inertial Odometry (VIO) algorithms typi-
cally rely on a point cloud representation of the scene that does
not model the topology of the environment. A 3D mesh instead
offers a richer, yet lightweight, model. Nevertheless, building a
3D mesh out of the sparse and noisy 3D landmarks triangulated
by a VIO algorithm often results in a mesh that does not fit the
real scene. In order to regularize the mesh, previous approaches
decouple state estimation from the 3D mesh regularization step,
and either limit the 3D mesh to the current frame [1], [2]
or let the mesh grow indefinitely [3], [4]. We propose instead
to tightly couple mesh regularization and state estimation by
detecting and enforcing structural regularities in a novel factor-
graph formulation. We also propose to incrementally build the
mesh by restricting its extent to the time-horizon of the VIO op-
timization; the resulting 3D mesh covers a larger portion of the
scene than a per-frame approach while its memory usage and
computational complexity remain bounded. We show that our
approach successfully regularizes the mesh, while improving
localization accuracy, when structural regularities are present,
and remains operational in scenes without regularities.
Index Terms— SLAM, Vision-Based Navigation, Sensor Fu-
sion.
SUPPLEMENTARY MATERIAL
https://www.mit.edu/~arosinol/research/struct3dmesh.html
I. INTRODUCTION
Recent advances in VIO are enabling a wide range of
applications, ranging from virtual and augmented reality
to agile drone navigation [5]. While VIO methods can
deliver accurate state estimates in real-time, they typically
provide a sparse map of the scene. In particular, feature-
based methods [6]–[9] produce a point cloud that is not
directly usable for path planning or obstacle avoidance. In
those cases, a denser map is built subsequently, e.g., by
using (multi-view) stereo algorithms [10], [11]. Alternatively,
direct every-pixel methods estimate denser point clouds on-
line [12]–[14]. Nevertheless, these algorithms rely on GPUs
which consume relatively high amounts of power, making
them impractical for computationally-constrained systems
such as micro aerial vehicles or smartphones. Furthermore,
these models typically decouple trajectory estimation and
mapping, resulting in a loss of accuracy [15], and produce
1
A. Rosinol and L. Carlone are with the Laboratory for Information & De-
cision Systems (LIDS), Massachusetts Institute of Technology, Cambridge,
MA, USA, {arosinol,lcarlone}@mit.edu
2
T. Sattler is with the Department of Electrical Engineering, Chalmers
University of Technology, Sweden. This work was done while Torsten was
at ETH Z
¨
urich, torsat@chalmers.se
3
M. Pollefeys is with the Department of Computer Science, ETH Z
¨
urich,
and with Microsoft, Switzerland, marc.pollefeys@inf.ethz.ch
This work was partially funded by ARL DCIST CRA W911NF-17-2-
0181, Lincoln Laboratory, and the Zeno Karl Schindler foundation.
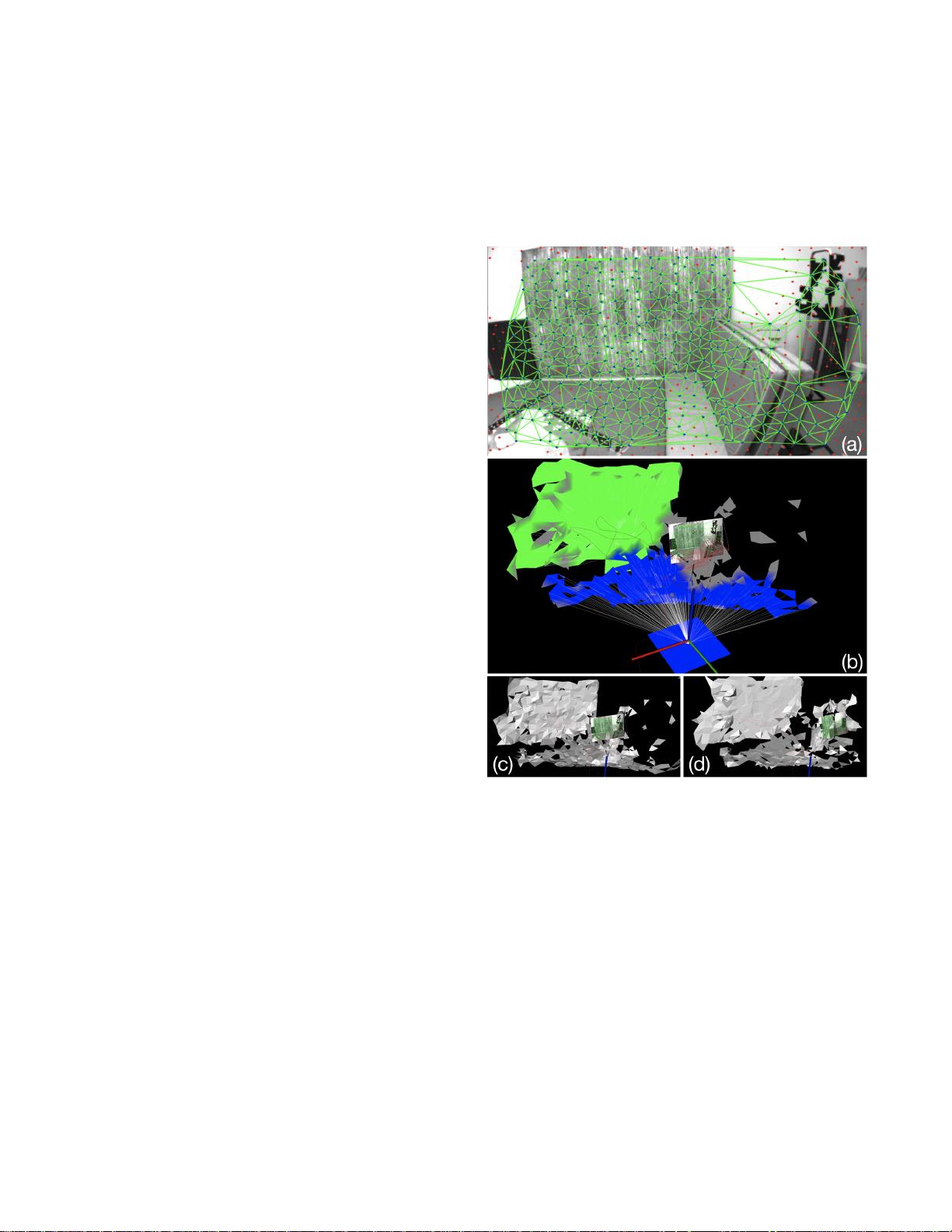
Fig. 1: We propose a VIO pipeline that incrementally builds
a 3D mesh of the environment starting from a 2D Delaunay
triangulation of keypoints (a). We also detect and enforce
structural regularities, c.f. (b) planar walls (green) and floor
(blue). The bottom row compares the mesh constructed (c)
without and (d) with structural regularities.
representations that are expensive to store and manipulate.
Ideally one would like to use a map representation that (i) is
lightweight to compute and store, (ii) describes the topology
of the environment, and (iii) couples state estimation and
mapping, allowing one to improve the other and vice versa.
A 3D mesh representation is lightweight, while it provides
information about the topology of the scene. Moreover, a
3D mesh allows for extracting the structure of the scene,
which can potentially be used to improve simultaneously the
accuracy of the pose estimates and the mesh itself, thereby
coupling state estimation and mapping.
Recent approaches have tried to avoid the caveats of every-
根据三角剖分加入结构化特征
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-10-07 上传
2008-12-21 上传
2022-08-03 上传
2021-10-24 上传
2021-10-17 上传
2021-10-16 上传

練心
- 粉丝: 27
- 资源: 305
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
