基于AGV的自动化物流系统设计:提高效率与应用广泛
68 浏览量
更新于2024-06-23
1
收藏 1014KB DOC 举报
本篇本科毕设论文详细探讨了一种基于自动导向车(AGV)的自动化物流系统设计,旨在提升物流效率和降低成本。系统的核心组成部分包括多功能AGV和监控中心,通过集成先进的技术和管理策略,实现了自动装载、搬运和卸载货物的功能。
设计目标围绕以下几个关键部分展开:
1. 设计要求:系统需具备智能化,能够根据预设路线行驶,精确停车,并且具有智能充电功能,确保长时间连续运行。此外,设计需考虑系统的稳定性和可靠性,适用于汽车、家电、机械、电子、纺织、卷烟、食品等多个行业的自动化生产线。
2. 方案比较与论证:论文深入研究了中央处理器的选择,强调了其在系统中的核心作用。同时,讨论了动力及转向系统的优化设计,针对不同的引导方式进行了方案比较,并确定了最合适的AGV引导技术。
3. 硬件设计:包括装货和卸货模块的详细设计,如电路设计中涉及AGV的中央处理单元、黑白线信息采集模块、停车标识识别模块、自动循迹控制模块、智能充电模块以及障碍物检测模块。每个模块都旨在提高系统的响应速度和安全性。
4. 软件设计:论文提供了AGV主程序控制流程图和装卸货模块流程图,展示了系统内部操作逻辑。此外,还着重介绍了自动充电模块的程序设计,确保AGV在必要时能自主进行充电。
5. 系统测试:论文描述了详细的测试方案,包括各项性能指标的测试,如系统的精度、速度、耐用性等。测试结果表明了系统在实际应用中的稳定性和有效性。
6. 结论:论文总结了研究成果,指出基于AGV的自动化物流系统是现代工厂提升生产效率、降低成本和实现无人化的理想解决方案,具有广阔的市场前景。
通过这篇论文,读者可以深入了解AGV在物流领域的实际应用及其关键技术,为未来的自动化物流系统设计和优化提供了有价值的参考。
基于 AGV 的自动化物流系统设计
4
基于 AGV 的自动化物流系统
1 设计任务
本系统设计要求 AGV 能够精确平稳地自动沿着预定轨道行驶,在无人操作
的情况下准确无误地在指定地点同装卸货设备共同完成自动装载货物和卸载
货物的功能。
1.1 设计要求
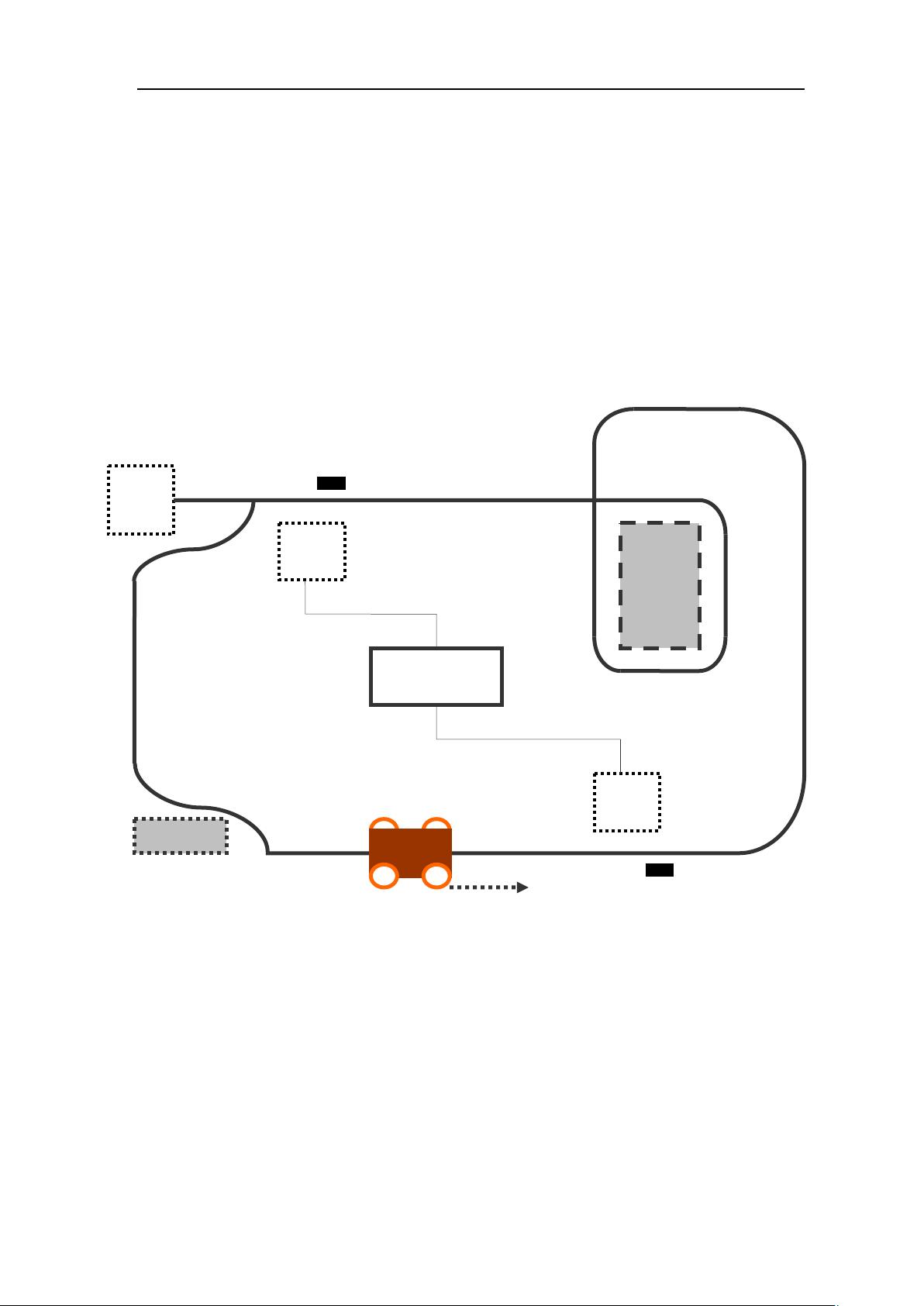
设计要求如图 1-1 所示:
具体设计要求:
1. 小车能够自动沿着黑色的轨道行驶。
2. 当小车到达在指定的装货区域时,小车能够识别装货标记自动停车,装货平台把
货物装载到小车上;
3. 小车装货完毕后继续沿预定轨道行驶,当到达指定的卸货区域识别到卸货标记
时自动停车,卸货平台自动把小车上的货物卸载下来。
装货标记
装货
区域
卸货标记
充电
区域
卸货
区域
图 1-1 设计要求图例
工厂
内部
机组
内部机
组
物控中心
AGV
剩余22页未读,继续阅读
2021-09-21 上传
2021-10-04 上传
2023-07-09 上传
2021-10-11 上传
2022-11-13 上传
2022-11-13 上传

xinkai1688
- 粉丝: 390
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- StateEstimationforRobotics-CN.pdf.tar.gz
- Desktop,c语言火车票订票管理源码,c语言
- node-font-list:获取系统中安装的字体列表
- 菲尼克斯微型继电器手册.rar
- MICROMAKEL3+ 3ds chitubox插件
- Honeywell_hackathon
- developer-knowledge:独立的增强型知识项目分层清单,可以成为更好的软件开发人员。 标题
- h2gis,H2数据库的空间扩展。.zip
- NewtonJson.rar
- shell:一种用于IBM Cloud Functions and Composer的基于电子的开发工具
- 20210315-中国联通-通信行业:5G终端白皮书V4(2021年度).rar
- 单片机频率计仿真protues
- 情人节图标 .svg素材下载
- Android_Projects:我尝试学习Android开发时所做的旧项目
- 主题默认值:Hexsoftstudio CSS默认值
- Gestrue,安卓、安卓、安卓.zip
