四足仿生移动机器人结构设计与应用
版权申诉
113 浏览量
更新于2024-06-23
收藏 908KB DOC 举报
"四足仿生移动机器人结构设计的说明书涵盖了机器人的设计原理、构造细节以及其在特定场景中的应用潜力。这款机器人具有远程遥控和全自主动作的能力,由伺服电机驱动的腿结构组成,能够在复杂不可预测的环境中移动。设计重点在于平衡机器人的强度、刚度和重量,以降低动力消耗,提升灵活性。"
正文:
四足仿生移动机器人是一种模仿自然界动物行走方式的机器人,其结构设计旨在实现高效、灵活的运动能力。这款设计包括一个机体和四个由伺服电机驱动的腿结构。伺服电机是控制系统的核心部分,它们能够精确地控制腿结构的各个关节,包括髋关节、大腿、膝关节、小腿关节和足端,总共提供了12个自由度,使得机器人能够进行复杂的运动。
在设计过程中,考虑到机器人需要在非结构化环境中运行,如星球探测、战场侦察、排爆或灾难救援等任务,其结构必须具备良好的适应性和越障能力。因此,设计者在确保足够的强度和刚度的前提下,对机器人的整体质量进行了严格的限制,选用轻质且坚固的LY2硬质铝合金作为腿结构材料。这不仅减少了驱动源的动力消耗,还使得机器人更加轻便,提高了其机动速度,平均速度至少达到0.4米/秒。
此外,该机器人的灵活性和环境适应性是其重要特性。12个自由度的腿结构允许它做出多种复杂动作,能有效地跨越障碍。在高危和复杂环境中,这种灵活性和适应性使得四足仿生机器人成为理想的工具,可以执行人类难以或无法完成的任务。
关键词“四足仿生”和“带传动”表明,设计中可能采用了仿生学原理来设计机器人的腿部运动模式,类似于动物的步态,而“带传动”可能是指在伺服电机与关节之间的传动机制,可能是为了更高效地传递动力和控制关节运动。
四足仿生移动机器人通过巧妙的结构设计和伺服电机的精确控制,实现了对复杂环境的适应和高效移动。其在科研探索、军事应用和应急救援等领域具有广阔的应用前景。
是足式机器人近 10 年来在控制方面取得的最具突破性成果[2]。2000-2003 年研制成
功具有宠物狗外形的机器人用一台 PC 机系统控制,瑞士 Maxon 直流伺服电机驱动,
每个关节安装了一个光电码盘、陀螺仪、倾角计和触觉传感器。基于 CPG 的控制器
用于生成机体和四条腿的节律运动,而反射机制通过传感器信号的反馈,来改变 CPG
的周期和相位输出。机器人能够实现不规则地面的自适应动态步行,显示了生物激励
控制对未知的不规则地面有自适应能力的优点。
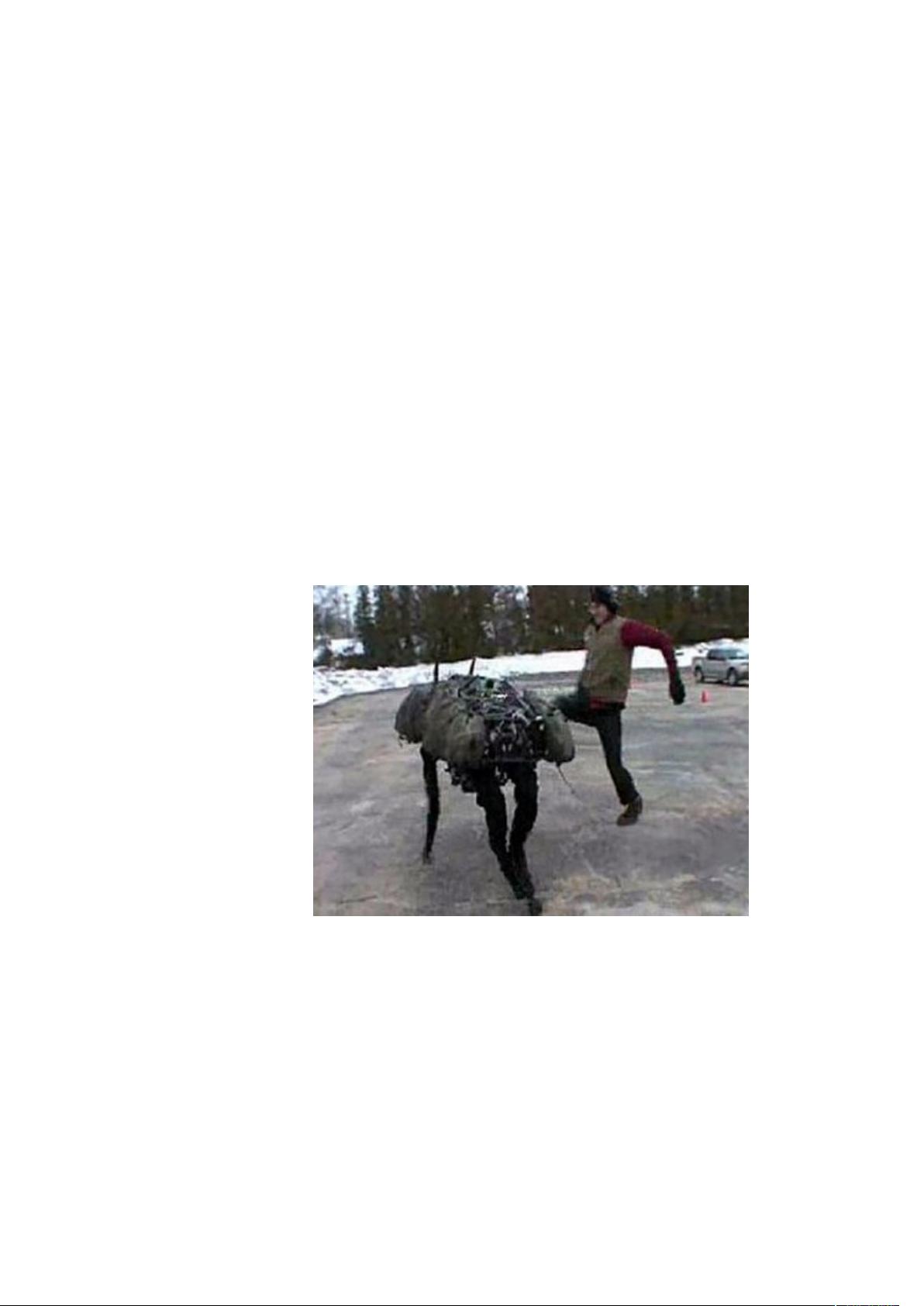
美国的四足机的典型代表是卡耐基美隆大学研制的 BigDog,外形体特和比例很
像一条凶猛的猎犬,是仿生机器人中最像仿生对象的机器人之一,它能够在泥泞地面
或粗糙的瓦砾地面以不同步态自如行走,最大负载 52KG,具有很强的野外行走能力。
最大的特点是在剧烈的侧面冲击作用下,仍具有很好的机体平衡能力,能保持平衡而
不倒,如图 1 所示。现已计划深入研究 BigDog 四足移动机器人,使其性能达到实现
多种动态移动,如平衡、走、爬行、跑等,并使其多方面达到一个新的水平[3],具
备识别粗糙地形、运载货物能力、自主控制能力等。
图 1 美国卡耐基美隆大学研制的 BigDog
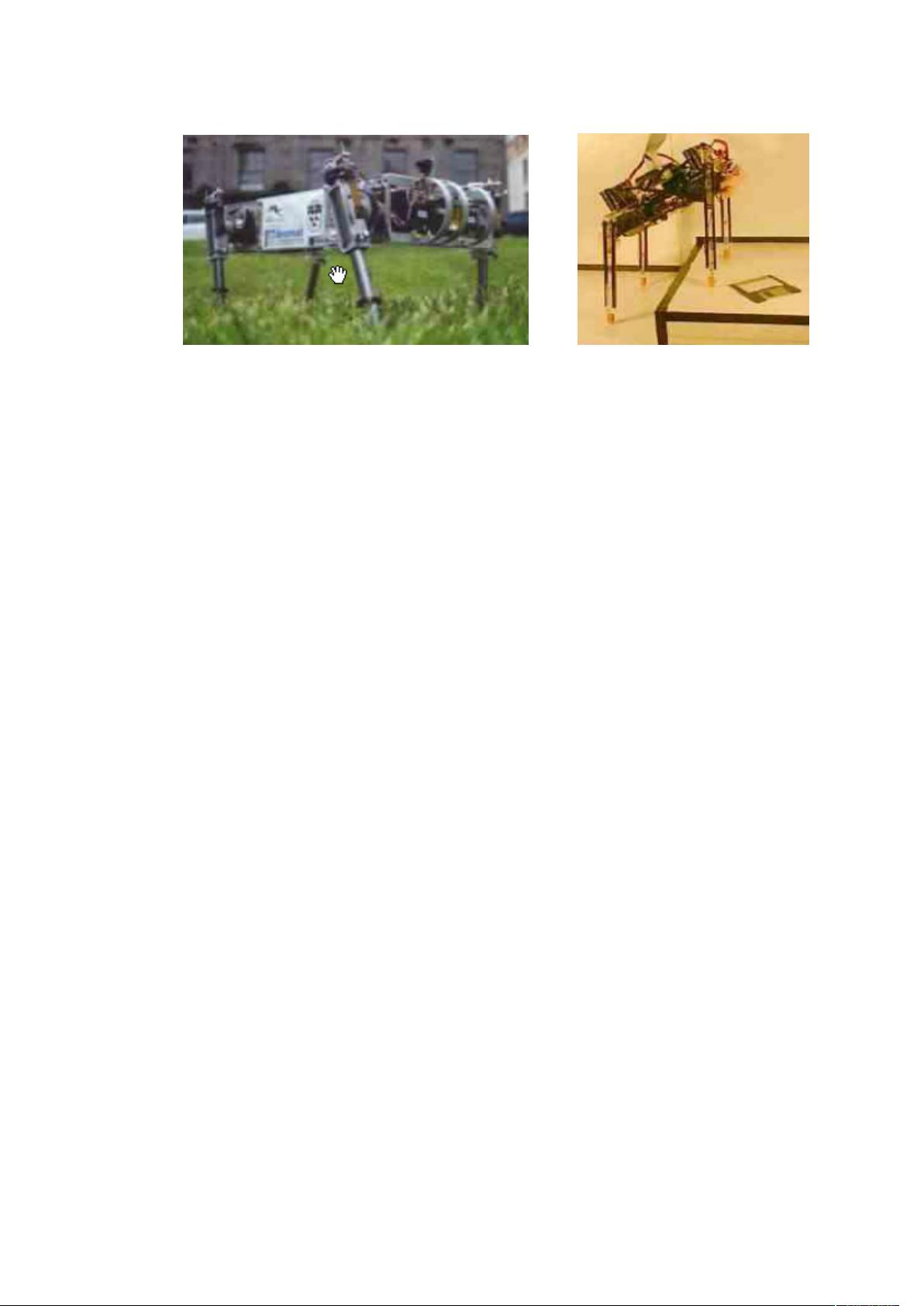
加拿大 McGill 大学智能机器中心机器人技术实验室研制了 Scout-I 与 Scout-II 两
代四足移动机器人,Scout-I 的每条腿仅有 l 个自由度,髋部也只有 1 个驱动器,主要
被用来进行行走控制,它的机械结构虽然简单,却有着良好的动态稳定性,如图 2;
图 3 自主型奔跑机器人 Scout-II,也是髋部只有 1 个驱动器,但只需改变前腿和后腿
的触地力矩和触地角度 4 个参数,控制两个自由度的变量,进而就可以控制机器人的
运动。
剩余32页未读,继续阅读
2023-09-07 上传
2023-07-11 上传
2023-07-11 上传
2023-07-01 上传
2023-07-15 上传
2021-10-11 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
