SPCE061A单片机实现的语音控制小车系统设计
51 浏览量
更新于2024-09-01
收藏 201KB PDF 举报
"基于SPCE061A的小车语音控制系统,使用16位单片机SPCE061A和C/汇编混合编程实现,包括主控模块、语音处理、电机控制及路程测量等部分。"
在这个基于SPCE061A的小车语音控制系统中,设计者选择了一款16位的单片机SPCE061A作为核心控制器,以满足对内存和处理能力的需求。SPCE061A拥有32KB的ROM和2KB的SRAM,内置A/D和D/A转换器,便于进行语音录放功能的实现。此外,该单片机对C语言的支持使得软件开发更为便捷。
在软件层面,系统采用C语言和汇编语言混合编程,这两种语言的结合既可以利用C语言的易读性和抽象性,又能利用汇编语言的高效性,以实现实时的硬件控制。语音处理模块运用了凌阳的语音压缩算法,全部通过软件实现,无需额外硬件支持。
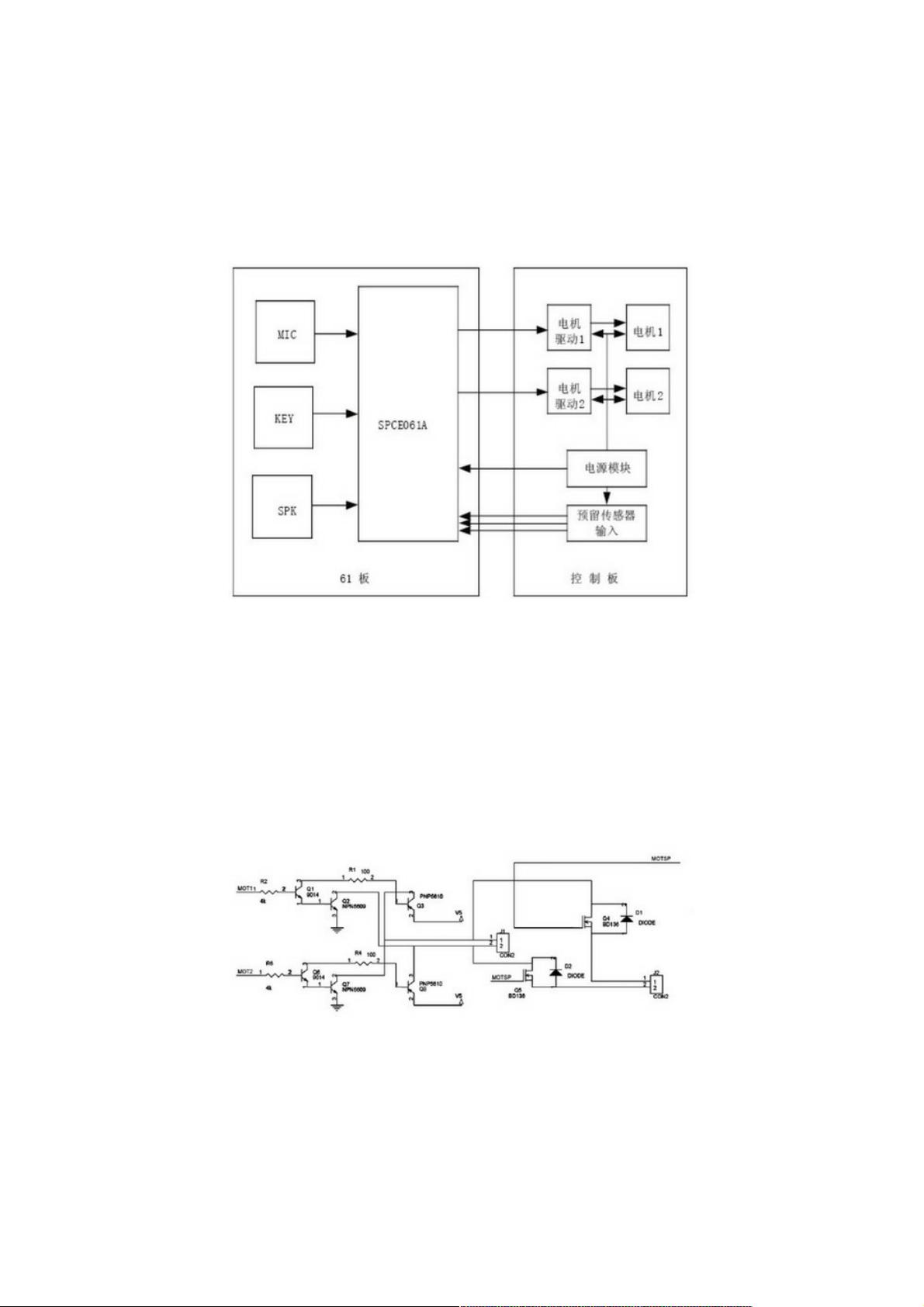
电机控制模块选择了直流电机,因为它具备快速响应和易于控制的特性,能更好地适应小车的运动需求。图2描绘了电机控制模块的原理图,显示了如何通过单片机控制电机的正反转和停止,从而实现小车的前进、后退和其他动作。
测路程方案是通过红外对管实现的,如图3所示。在车轮转轴上安装带有孔洞的转盘,当红外光透过孔洞被接收管检测到时,电平变化会被单片机捕捉,进而计算出小车的行驶距离。这种方法具有体积小、成本低和安装简便的优势。
系统硬件结构分为SPCE061A精简开发板(主控模块)和电机控制板。开发板提供系统控制,而电机控制板则负责驱动小车的两个电机。小车控制板还包括接口模块、预留传感器接口和电源模块。电源模块采用L7805稳压芯片,以确保系统的电压稳定和抗干扰能力。
电机控制模块作为核心部分,其设计包括方向控制和速度控制单元,前者决定电机的正反转,后者则用于调节电机速度,以适应不同应用场景。红外对管的电路原理图进一步展示了如何利用这种传感器来准确测量小车的运行路程。
这个基于SPCE061A的小车语音控制系统是一个集成了高效处理器、混合编程技术、精确电机控制和智能路程测量的综合性项目,展现了在嵌入式系统设计中的创新与实用性。
基于基于SPCE061A的小车语音控制系统的小车语音控制系统
本文设计的语音控制系统主要采用16位单片机SPCE061A来实现。软件编程则是采用C语言和汇编语言的混合编
程来实现的,集两种语言的优点于一体,实现对硬件的实时控制。
引言 引言
图1系统硬件结构图
方案论证 方案论证
主控模块和语音处理模块的选择 主控模块和语音处理模块的选择
较MCS-51系列单片机而言,SPCE061A单片机内部集成有32KB的ROM、2KB的SRAM,更能满足软件对空间的要求,
且不需要扩展相关存储器。另外,该类单片机完全支持C语言,软件编写比较方便,语音处理模块采用凌阳的语音压缩算法,
也用软件来实现。该单片机内部集成有A/D、D/A转换功能,方便实现语音录放功能。
电机模块的选择 电机模块的选择
电机模块选择直流电机。与步进电机相比较而言,直流电机具有转速快、控制方便等特点,更能够满足
图2电机控制模块原理图
测路程方案的选择 测路程方案的选择
本文利用红外对管来实现对小车的路程测量。在小车的车轮转轴上安装一个不透光转盘,在转盘边缘均匀地打N个孔,当
红外发射管发射的红外光经小孔照射到接收管时,接收管的反向端电平将发生变化,单片机通过检测这种电平的变化便可以自
行计算出小车的运行路程。红外对管还具有体积较小、安装较霍尔传感器更方便、成本低等特点。
系统硬件结构 系统硬件结构
语音控制小车的系统硬件结构主要由两部分组成:一部分是SPCE061A精简开发板,另外一部分是电机控制板。
SPCE061A精简开发板为系统主控模块,电机控制板则驱动小车的前后两个电机按系统的要求工作。
下载后可阅读完整内容,剩余3页未读,立即下载
2010-06-26 上传
2008-11-01 上传
2011-03-02 上传
2023-05-14 上传
2023-03-30 上传
2023-05-15 上传
2023-03-30 上传
2023-12-16 上传
2024-10-31 上传

weixin_38706747
- 粉丝: 5
- 资源: 962
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
