Arduino实现PID测距控制探索
需积分: 10 14 浏览量
更新于2024-08-11
收藏 721KB DOCX 举报
"基于Arduino的PID测距控制,利用Arduino UNO和夏普红外传感器实现位置跟随运动,并探讨PID算法在其中的应用。"
在本项目中,作者利用Arduino这一开源硬件平台,结合PID控制算法,旨在实现更精确的距离测量和位置跟随。首先,硬件配置包括一个夏普红外传感器,该传感器能提供4-30cm范围内的模拟距离输出。Arduino UNO则负责接收模拟信号,并通过`analogRead()`函数将其转换为数字量,以便进一步处理。
在代码实现中,`loop()`函数中读取传感器值,并用简单的线性转换公式将模拟值转化为实际距离。这段代码展示了如何将模拟量转换为可操作的数字量,其中`pin`代表模拟输入引脚,`distance`为计算出的距离。
PID(比例-积分-微分)算法是控制工程中的关键工具,用于调整系统的响应以达到期望的输出。在这个系统中,PID控制器的目标是让电机根据与目标位置的偏差进行调整,以实现位置的精确跟随。PID算法通过结合当前误差(比例)、过去误差积累(积分)和误差变化率(微分)来计算控制输出。
在程序中,PID算法被离散化,即每次采样后计算控制量`u`,它直接影响电机的转动,进而改变电机的速度。电机速度与输入电压成正比,电机的位置作为系统的调节量。当传感器检测到目标位置时,电机停止转动,从而实现了位置的精确控制。
在实际应用中,由于无法获得电机的精确传递函数,PID参数(Kp、Ki、Kd)的选择通常需要通过反复试验来优化。`millis()`函数在Arduino中用于获取系统运行时间,可用于设置控制系统的采样周期,从而实现PID控制器的时间控制。
这个项目不仅展示了Arduino与传感器的集成,还深入探讨了PID控制理论在实际项目中的应用,为读者提供了一个实践自动化控制和距离测量的实例。通过这样的实践,读者可以更深刻地理解PID算法的工作原理及其在硬件系统中的实现方法。
基于 Arduino 的 PID 测距控制
Kevinzhang
Arduino 作为现在最火的开源硬件平台之一,已经在世界上掀起众多电子爱好
者学习的浪潮。笔者作为学生,初了拿它实现简单的 IO 口控制外,还想加入更
多的元素,这次计划加入一个 PID 控制算法来实现位置跟随运动,以求追求更
加高大上的应用体验。
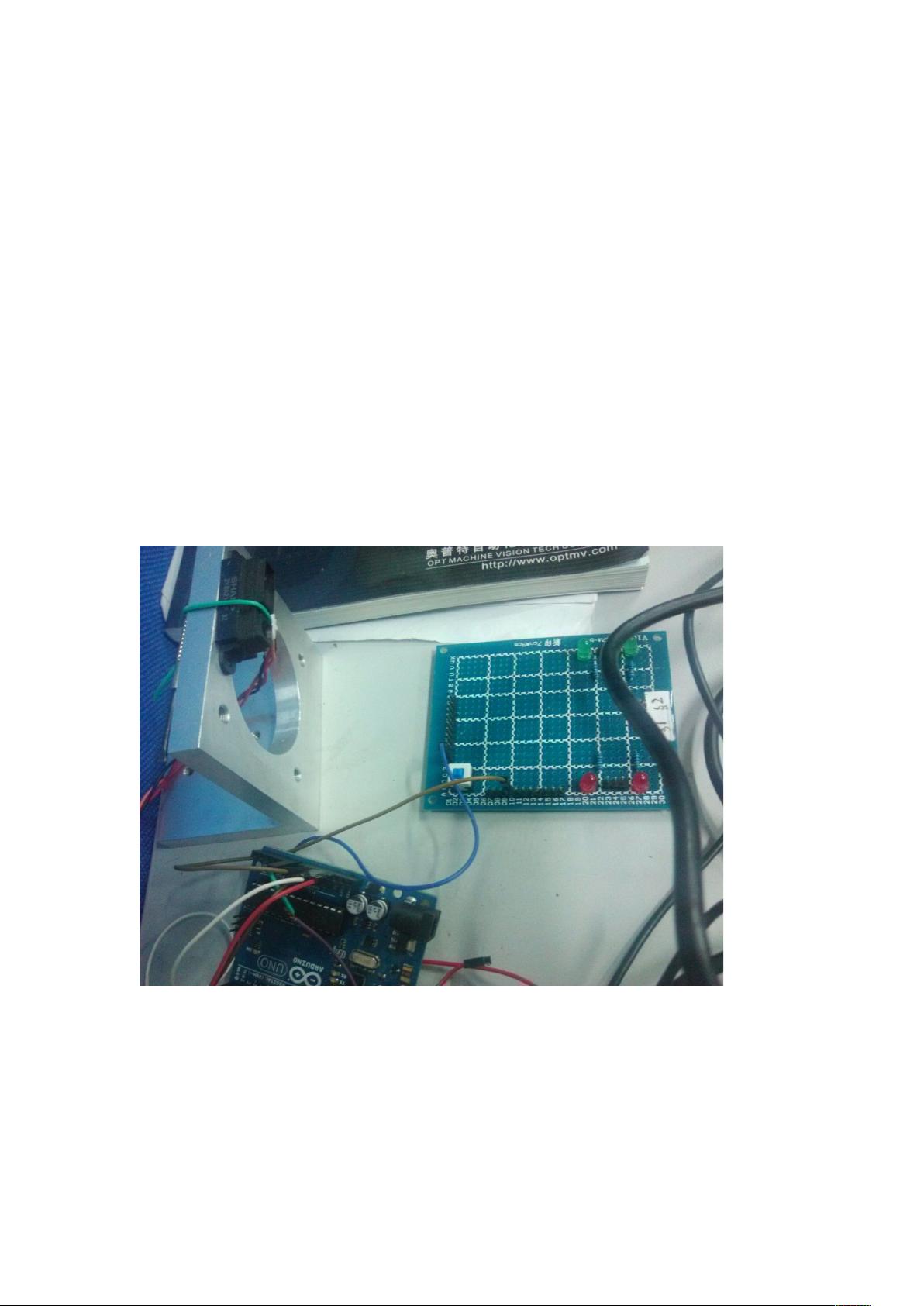
实验初步硬件平台如下:
下载后可阅读完整内容,剩余5页未读,立即下载
227 浏览量
2024-05-19 上传
2024-11-21 上传
2023-02-22 上传
2893 浏览量
361 浏览量

weixin_38642636
- 粉丝: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- 革新操作体验:无需最小化按钮的窗口快速最小化工具
- VFP9编程实现EXCEL操作辅助软件的使用指南
- Apache CXF 2.2.9版本特性及资源下载指南
- Android黄金矿工游戏核心逻辑揭秘
- SQLyog企业版激活方法及文件结构解析
- PHP Flash投票系统源码及学习项目资源v1.2
- lhgDialog-4.2.0:轻量级且美观的弹窗组件,多皮肤支持
- ReactiveMaps:React组件库实现地图实时更新功能
- U盘硬件设计全方位学习资料
- Codice:一站式在线笔记与任务管理解决方案
- MyBatis自动生成POJO和Mapper工具类的介绍与应用
- 学生选课系统设计模版与概要设计指南
- radiusmanager 3.9.0 中文包发布
- 7LOG v1.0 正式版:多元技术项目源码包
- Newtonsoft.Json.dll 6.0版本:序列化与反序列化新突破
- Android实现SQLite数据库高效分页加载技巧
